
はじめまして。スライドレールです。
ロボコン用ツイッターアカウントを作ってほったらかしてたらアカウント凍結されてました。
今回は第二回新人戦として工学院大学新宿キャンパスにて行われたF^3RC2018に参加した結果と
参戦機体の紹介をします。
工繊大からは2チーム出場しましたがAteam(No Progress)についてまとめます。
大会概要
今回参加してきたF^3RC2018。その大会の大雑把なルールを記しておきます。
今回のルールはその名も「ロボアサリ」。某Splat〇〇nのガチルールの一つをオマージュしたものです。
書き下すと
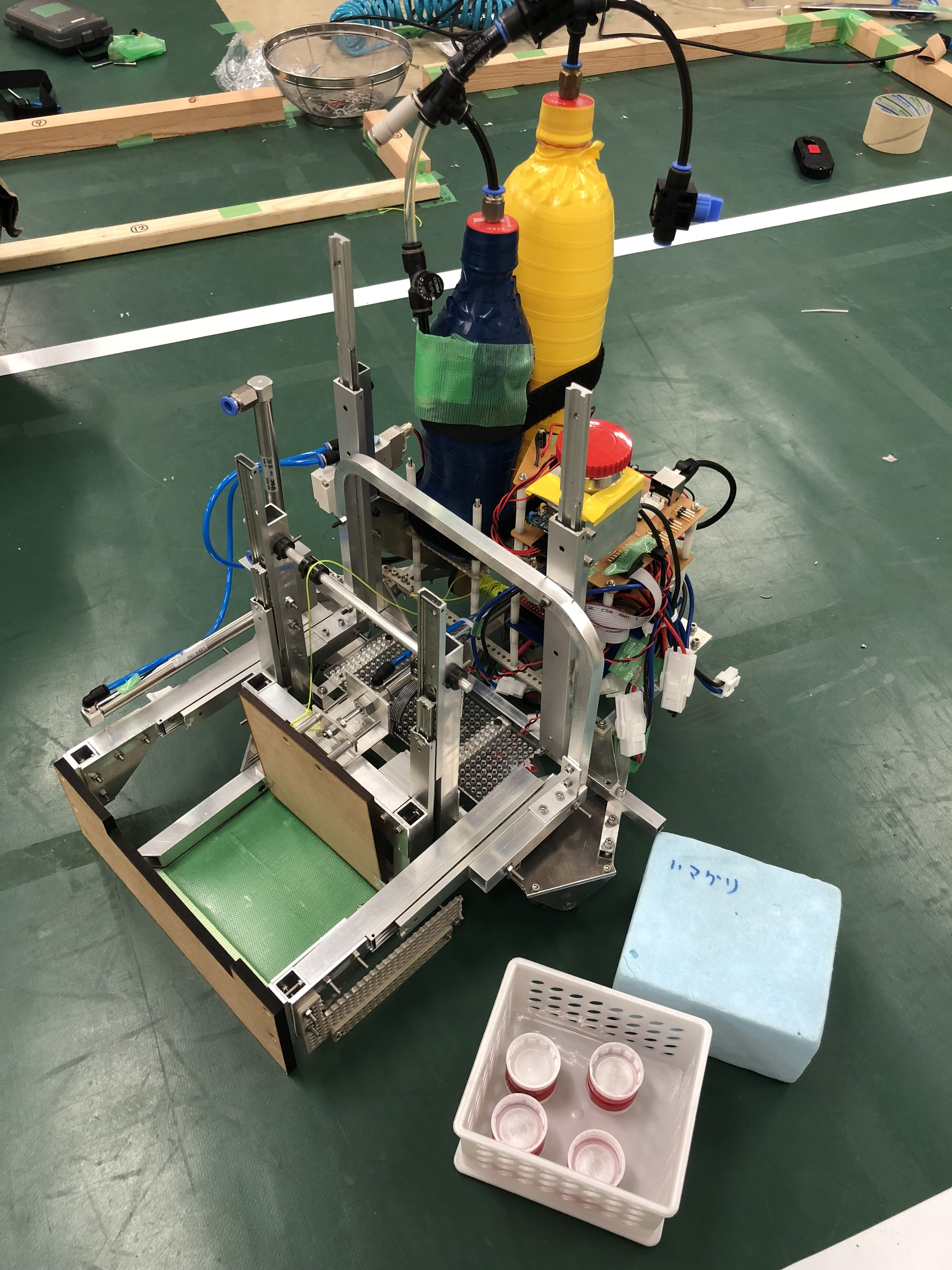
・相手より早くハマグリ(写真右下青いやつ)をハマグリ台へ運ぶことを目的とする。
・手動機はアサリ(写真右下ペットボトルのキャップを2つ合わせたもの)を回収
ガチアサリ(写真右下アサリ4個がケースに入っているやつ)を作って自動機に受け渡し
アサリをゴールエリアへ置き、ハマグリをハマグリ台へ置くことを目標とする。
・自動機はガチアサリを自動機ガチアサリ置き場へ置き、
アサリをゴールエリアに置くことを目標とする。
といったものです。フィールド等詳しい説明はF^3RC2018で検索すると出てくるのでそちらを参照してください。
大会当時の生放送もアーカイブとして残されているので(超ptpt)それを見るとわかりやすいかもしれません。
大会結果
さて気になる結果ですが僕たちAteamは優勝しました。大会初参戦であるにも関わらずさらってしまいました。
実は僕たちのチームは自動機が完全に完成していなかったため、最後まで目標(いわゆるVゴール)
を達成することができないまま大会に参加していました。
手動機に至っても前日までアサリを安定して取れない等、大会当日でも多くの調節を重ねながら
戦い抜いています。なぜ勝つことができたのか。
その秘訣は「再現性のある手動機」に寄るところが多いんじゃないかなと思います。
では今回多くの仕事をこなした手動機の紹介をしたいと思います。
Ateam手動機紹介
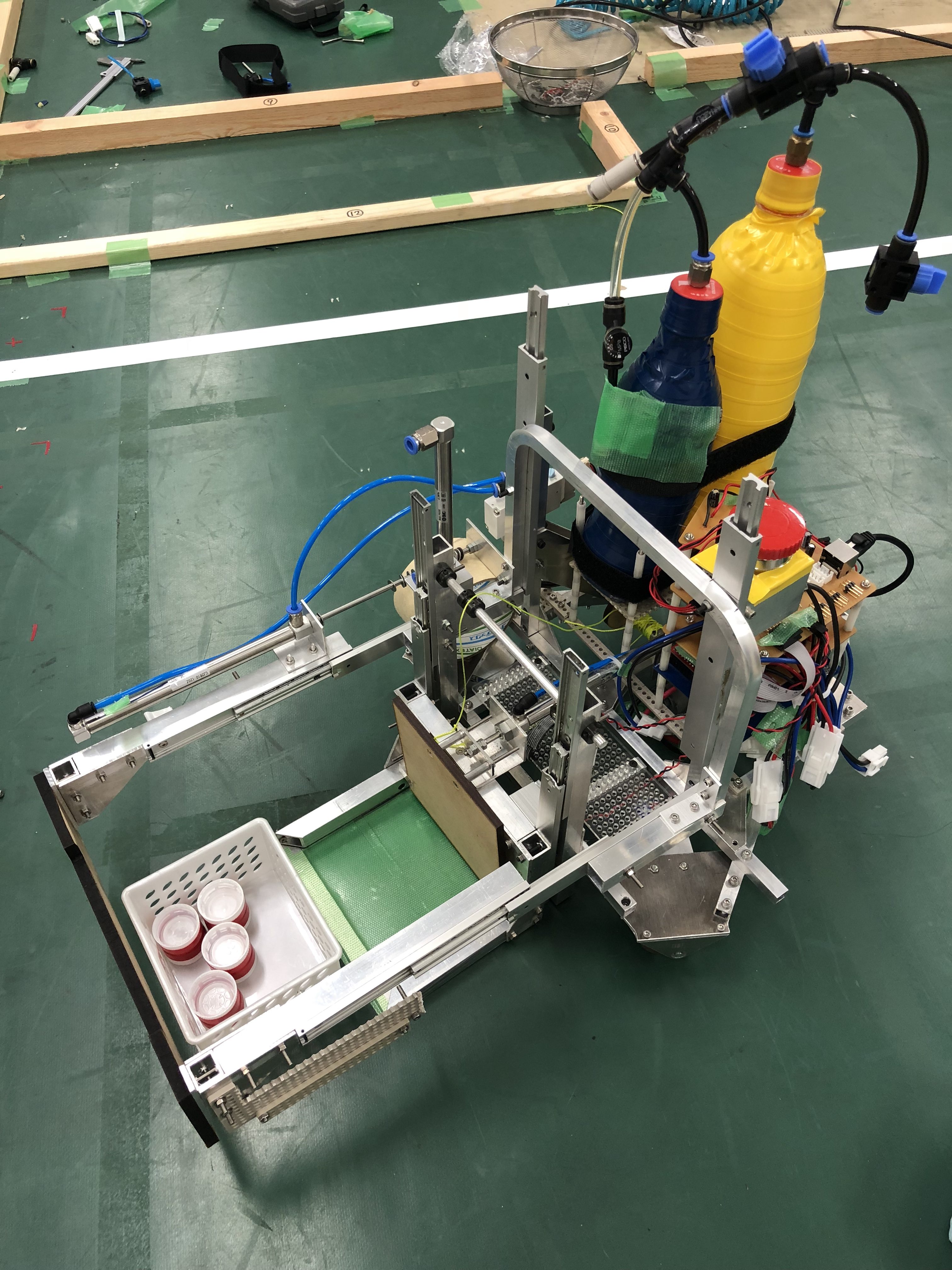
以下がAteamの手動機です。
詳しい説明をしだすと言葉では足りないので実際に見てもらうほうが早いのですが
簡単に言うならアサリ、ガチアサリ、ハマグリすべてを掻きこむ形で保持します。
ショベルでの掻きこみや押し出しはエアで行い
写真中央、養生テープが張られているエレベータはモータで紐を巻き取ります。
この手動機の強いところは
-
- 汎用性が高い
- アサリ等をつかみやすい
- 操作性が高い
- 手加工パーツが多い
- かっこいい(主観)
です。この手動機で一番僕が推したいところはずばり曲げの部分です。ここがまあ大変でした…。
単純に曲げをやってみたい、締結よりも強いという安直な考えのもと設計に盛り込んだ結果
ひどい目にあいました。とにかく精度を出すのが難しい。
このパーツを使っている部分はショベルの両端を橋のようにつないでいる部分です。
ここはその間隔が大事な場所で丁度よい幅を保たなければスライドレールに負荷がかかります。
するとうまくショベルが開かなくなってしまいます。
納得いくパーツができるまでおそらく5個以上は同じパーツを作ったと思います。
長さで言うと新品の10×10角パを1.5本分ぐらいは無駄にしてるんじゃnごにょごにょ…
まあ苦労した甲斐もあってかなり出来のいい機体が出来上がりました。
よくなかった点、改善を重ねた点、色々ありましたが当初のアイデア通りのイメージを具現化しました。
それが予想通りの動きをしてくれるというのは手動機設計担当として非常にうれしいところがあります。
足回りは三輪オムニで滑らかに動きます。
こちらは先輩が以前設計したものを少し改良して機体に導入しています。
まだまだ言いたいところはあるのですが止まらなくなるのでこの辺りにしておきます。
ぜひとも部を訪れて実物を見てください!僕も懇切丁寧に解説します!というか聞いてほしいですね。
あとがき
以上大会結果と手動機について述べました。
今回初出場の大会、さらには初の機体設計ということで慣れないことばかりでした。
その中でも優勝することができたというのは奇跡だと思っています。
僕自身大会に出るのが目的というよりも自分の作りたかったものができた時点で満足していました。
優勝したことによって勝ちに固執するようにはなりません。
この先も自分の作りたいものを実現するのが大事だと思っています。
また僕が設計した機体で大会に出たときにブログに出没するかもしれません。
ここまで読んでいただきありがとうございました。

追々ひらめ君に写真右の自動機についても紹介してもらいましょう。