ご無沙汰しております。”京都工芸繊維大学番犬”チームリーダーのクワガタです。2026年3月11日~12日に「ガレリアかめおか」で行われた関西春ロボコン2026の活動内容および結果を報告します。
チーム編成について
当チームは10人編成。うちハード班(設計・加工)が4人、電装班が1人、制御班が6人という構成でした。
機体紹介

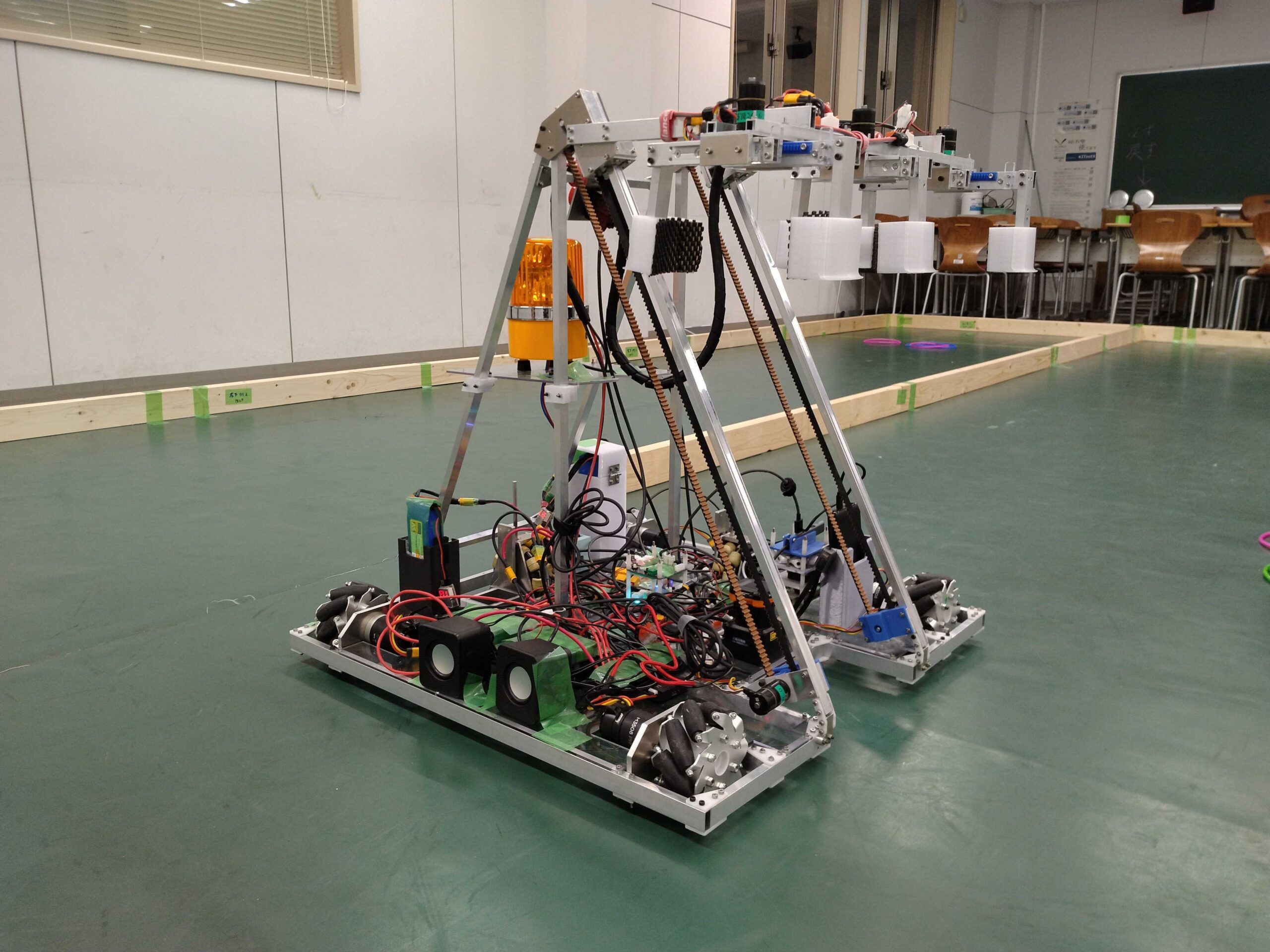
当チームでは完全自動化・Vゴールを目指して設計を行っておりました。4輪メカナムホイールの足回りと機体前面を昇降する3つのハンドをメインに構成されています。寸法は初期制限・展開制限ともかなりギリギリを攻めた設計となっております。これは機能を凝縮した結果ですが、同時に機構の干渉や整備性の低下を招き、また、制御班にも迷惑をかけてしまう結果となり、反省すべき点だと考えています。また、足回り・上部の全てにおいてロボマスモーターを採用しました。
足回り(メカナム)

↑組み立て途中のフレーム
足回りには、当部としては久々の採用となる4輪メカナムホイールを導入しました。メカナムのポテンシャルを引き出すには「4輪すべての確実な接地」が不可欠ですが、組立直後は接地バランスに苦しめられることとなりました。定期試験期間中という過密スケジュールの中、チーム全員で解決に取り組んだおかげで安定した走行を実現できたと思います。
また、フレームについては、Vゴール時に本丸用の木枠および斜め昇降との相性を考え設計しました。
ハンド


本ハンドは、「1つの機構でリングと櫓の両方を把持する」というコンセプトのもと設計を行いました。具体的な構造として、リングに対してはハンドの外側、櫓に対してはハンドの内側を用いて把持を行い、異なる形状への柔軟な対応を可能にしています。把持の安定性を高めるため、物理面ではハンド内側に摩擦増強用の滑り止め材を配置し、システム面ではモーターの電流値制御によりトルクを増強するソフト的アプローチを導入しました。
開発過程ではリングの個体差への対応に難航しましたが、結果として機構の集約化に大きく貢献し、ロボット全体の軽量化と制御の簡略化を実現した重要なユニットとなりました。
昇降
Vゴールを決めるために、本丸へのリング投入と、木枠越しでのリング把持の両立を目指しました。足回りのフレームとぶつからないよう、ベアリングガイドとベルトを使った「斜め昇降」を採用しています。
欲張った設計にした分、スペースに全く余裕がなく、一番上から下まで完璧に動かすことが絶対条件という厳しい状況でした。しかし、ソフト班がうまく制御してくれたおかげで、狙い通りのスムーズな動きを実現することができました。
ソフト
制御班には最後まで完全自動化を目指して粘ってもらいましたが、ハード班の遅れもあり、本番での実現は叶いませんでした。しかし、彼らが事前に「手動でのVゴール」を確実に達成できる土台を作ってくれていたおかげで、直前の仕様変更にも関わらず本番で結果を出すことができました。
加えて、電装班が大会を通して事故なく機体を維持し、トラブル時にも即座に動いてくれたことも大きな勝因です。彼らのサポートと技術的な成長を、非常に頼もしく感じた大会でした。
大会結果
予選リーグは1勝1敗と崖っぷちの状況でしたが、なんとか決勝トーナメント進出を果たし、最終的にベスト8まで上り詰めることができました。
特に、大会直前で手動機への仕様変更を余儀なくされたにもかかわらず、高い集中力でチームをベスト8へ導いてくれた操縦者には、心から感謝しています。どの試合でも着実に得点を積み重ねられたのは、操縦者の技術と、最後まで諦めないチームの粘り強さがあったからこそです。
「大会は何が起きるか分からない、だからこそ面白い!」という醍醐味を、身をもって実感することができました。この最高の結果は、日頃のチームワークが実を結んだ証だと思います。
大会を終えて
今大会は、ハード・ソフトの両班にとって非常に学びの多い場となりました。チーム内で明確なタスク分担を行い、密に「報連相」を徹底できたことが、大きな成果に繋がったと感じています。
もちろん、まだまだ至らない点や、改善すべき課題も多く見つかりました。しかし、これらの成功と失敗の両方を貴重な糧として、しっかりと次のステップに活かしていきたいと思います。
締めの言葉
これまで様々な形でサポートしてくださった先輩方、そして応援してくださった全ての皆さま、本当にありがとうございました。
今大会で得た学びと悔しさを糧に、次の「関西夏ロボコン2026」では、新2回生メンバー全員でさらなる高みを目指して走り抜けます。これからも私たちの成長を見守っていただけると幸いです。よろしくお願いします!