どうも、リーダーをしておりました、あまなつです。
今回は、先日ガレリアかめおかで開催された関西春ロボコンの活動報告を行います。
関西春ロボコン2026 ルールについて
関西春ロボコン2026は「陣取合戦」をテーマとして開催されました。
5つの陣取りゾーンを互いに奪い合い、勝利を目指します。
まず、機体は櫓と呼ばれる、フィールドに5つ設置されている太い塩ビパイプをいくつか陣取りゾーンに運搬します。
そして、その櫓(パイプ)に、20個用意されているリングをそれぞれかけていきます。
互いのフィールドで対応する陣取りゾーンにある櫓にかかっている輪の数でエリアを奪い合います。
試合時間内に、3つのエリアを奪い、本丸と呼ばれる高く細い塩ビパイプに輪をかけ、合図ができれば「陣取達成」、すなわちVゴールです。
チームについて
我々「京都工芸繊維大学招き猫」は、ハード(機械班)4名、電装班1名、制御班4名の計9名で構成されています。
ハード、電装、制御すべてにおいて、個の力を最大限に生かし、戦い抜けたチームであったと思います。
(それがいいのか、悪いのかについては賛否両論あると思いますが)
機体について

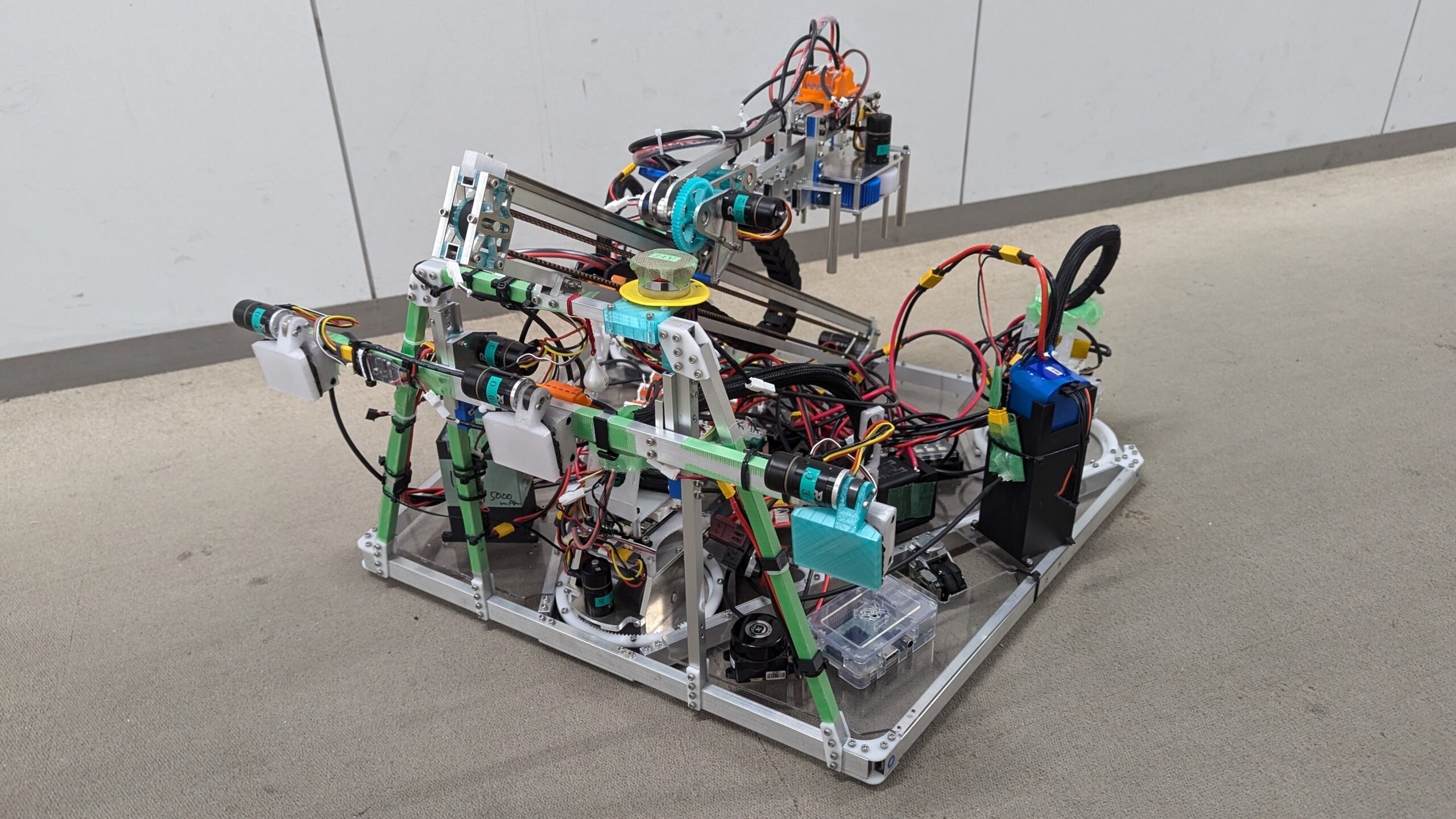
我々の機体は、足回りに3輪独立ステアを用い、櫓ハンドを3つ、リングハンドを2つ、そしてリングハンドを前後に移動しつつ上げ下ろしする斜め昇降と平行リンクのアームで構成されています。
正直なところ、見栄えだけで言えば最高級にかっこいい形にできたかな…と思っています。
この形に収まった一つの理由として、初期にベル直での射出を狙っていたことがあります。
3輪独立ステアに、櫓、リングハンド、ベル直の構成は個人的には美しくて好きでした。
結局諦めきれずにこの形に収まったわけです…。
それでは、個別に機構を説明していきます。
3輪独立ステアリング機構

今回の大会では、経験の獲得と技術開発的な意図も含みつつ、独立ステアリングに挑みました。
駆動には、aliexpressで購入したブラシレスモーターをダイレクトドライブで用い、
操舵にはRobomaster m2006を用いました。
全体的に、見た目はアルミの塊になってしまったのですが、内側には肉抜きを施し、軽量化と強度、剛性の確保を両立しました。
しかし、設計者自身、モーターが大きかったこともあり、独立ステアリング機構全体が大きくなってしまったこと、またそれに伴ってかなり重くなってしまったこと、配線の流れを考えていなかったがゆえに電装に迷惑をかけてしまったという点で大きな学びがありました。
我がチームの電装さんはかなり優秀でした。制御がミスで5周ほど同じ方向に旋回させてしまったことがありました。「これはさすがに断線したか…」と思っていたのですが、なんとすべて無傷という素晴らしい配線を行ってくれました。
設計した人間としてものすごく感謝しています。
また、制御にも大変感謝しています。
ステア自体について、上がるのが遅くなってしまったにもかかわらず、大会までにしっかりと動くコードを作成してくれました。
独立ステアリング機構全体として、チームメンバーにたくさんの壁を押し付けてしまったにもかかわらず、あきらめず努力して、見事しっかりと動いてくれたことについて、改めて感謝しています。ありがとうございました。
櫓(パイプ)ハンドについて

櫓ハンドは、機体正面に3つついています。
モーターは、ハンド、昇降ともにRobomaster m2006を用い、
全体的にシンプルかつ小型に抑えることを意識して設計しました。
櫓ハンドはパイプの縁をつまむような機構にすることで、ワークであるパイプの大きさより圧倒的に小型で、機構としての占有体積を小さくしました。
また、滑り止めを可動側、非可動側それぞれに張り付けることで、摩擦を増やしています。
リングハンド、アーム、昇降について
リングハンドは、上にある1枚目の写真で、背中側に背負うようについているものです。
斜めになっているベルト昇降と平行リンクを用いたアームを使うことで、木枠を越えてリングを回収するとともに、機体の向きを変えることなく櫓、本丸にリングを掛けられる構造になっています。
個人的に、斜め昇降は機体のシルエットを締めるうえでいい働きをしてくれたなと思っています。
(射出から逃げられなかった感は否めませんが…)
リングハンドは、2×2の4本のリングを同時に持てる設計になっており、リングの内側に2本、外側に2本の棒を入れ、内側の棒を開いていくことでリングを把持する構造になっています。
この部分は、チームメンバーの一人に設計してもらったのですが、私としてはかなりお気に入りポイントの一つではあります。
許容誤差や安定感の面でかなり難があり、たくさん手間をかけた部分で、その分愛着もわきました。
実際大会でも、安定してリングを把持でき、また櫓にリングを掛けることもできました。
大会前のトラブル 大会結果
最後に、大会前のトラブルと大会結果をまとめます。
機体発送の日、なんと…各ハンドや足回りなどのパラメーター系および環境構築を行いOSを入れていたRock5(ラズパイみたいなもの)のSDカードを折損するという事故が発生しました。
バックアップもなかったようで、学校での調整ももう行えないタイミング…
前日のテストランや試走で詰め切るほかありませんでした。
それでも何とか、それぞれの機構は動く状態まで持ち込むことができ、なんと奇跡的に2勝0敗で予選リーグを突破できました。
これは何より、制御さんの調整の腕もありますし、先輩方の手助けのおかげでもあります。
本当にありがとうございました。
また、予選を突破できたため、決勝トーナメントに進出しました。
我々の機体は、できる限り、精一杯戦い抜きましたが、相手のVゴールの速度には及ばず、一回戦で敗退という結果となりました。
ハードの許容誤差がもう少し大きいだけで、値が詰め切れているだけで、大会当日のVゴールもあったかもしれないと思うだけに、悔しい点も多くありましたが、これらの経験に学び、次回以降の大会に生かしていきたいと思います。
応援ありがとうございました。
次の大会は、来年度、8月にある関西夏ロボコン2026です。
精一杯頑張りますので、応援よろしくお願いします!!