こんにちは!きゅうり巻きです。
前回、自分が書いた記事では第三回新人戦について紹介したのですが、今回の記事は各チームのロボットについて、特徴やどのように課題を解決していくのか紹介します。
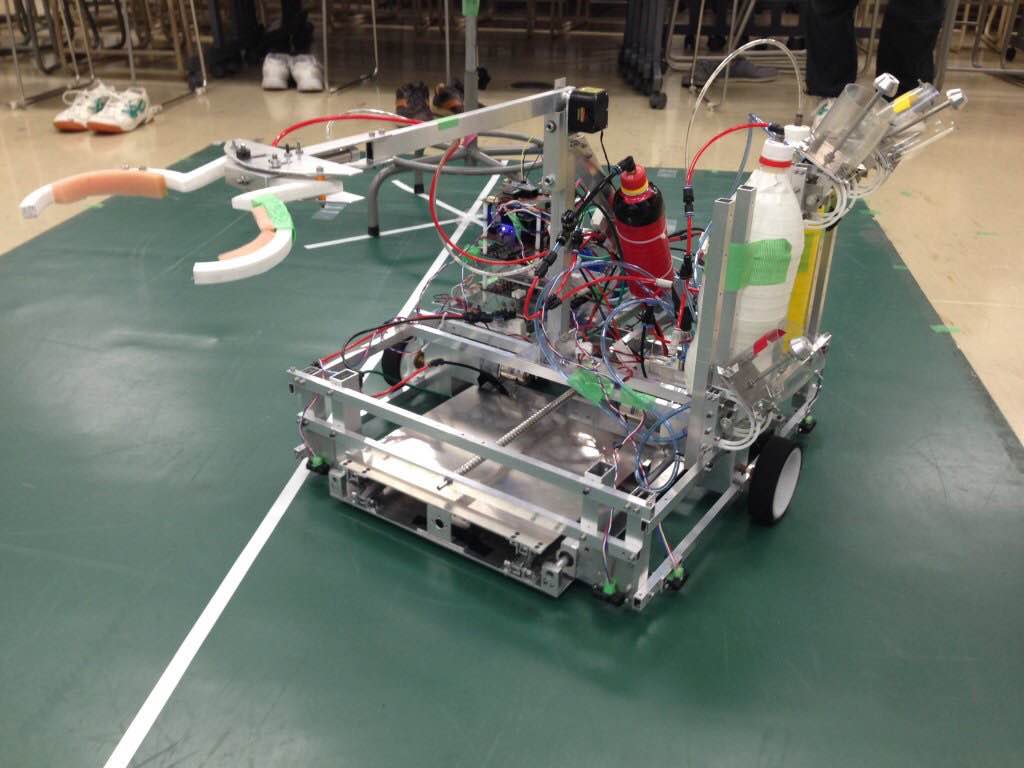
最初はAチーム。チーム名は『羽花繚乱』で、ロボット名は『工業力学Ⅲ』です。
・特徴
2輪駆動で剛性が高く、さらに重心がかなり低いため、試合中も安定して走行していました。
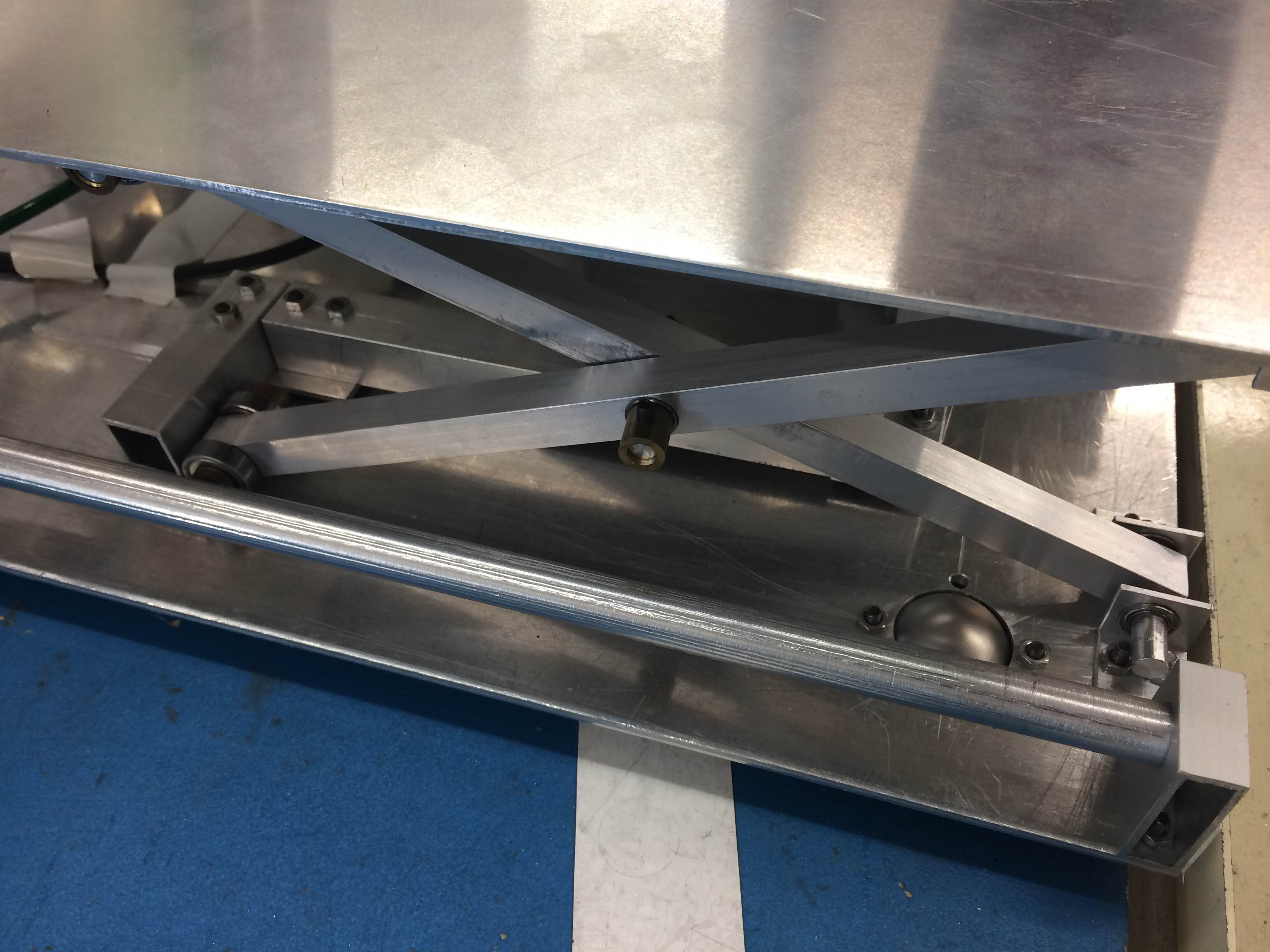
・机(段ボール)の運搬
このロボットには机を持ち上げる機構が収納されており、机を持ち上げるときだけその機構を出して机を持ち上げます。


持ち上げる機構はエアシリンダを使った平行クランク機構です。
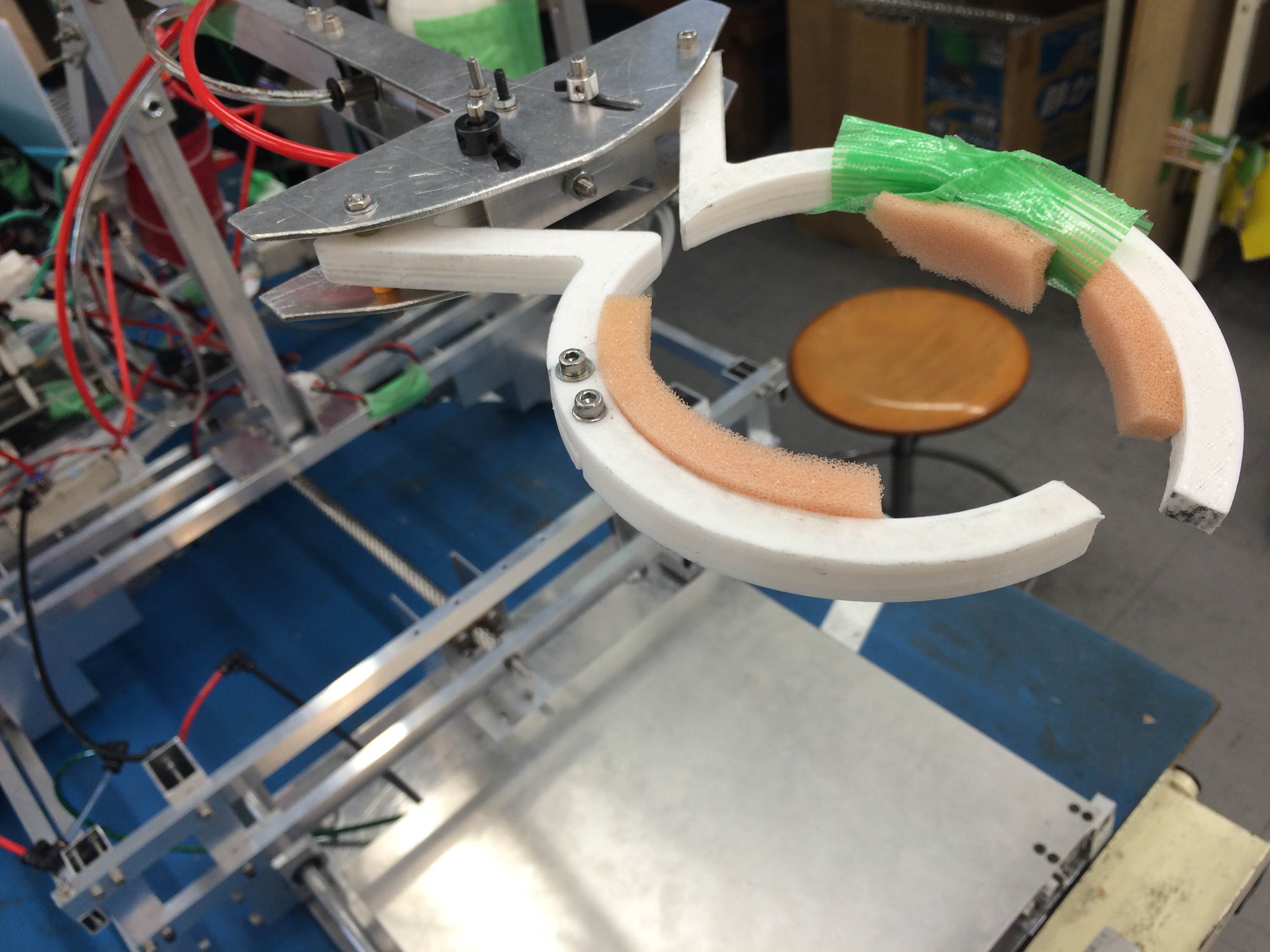
・養生テープの片付け
養生テープは長いアームでつかんで片付けます。把持部分は3Dプリンタで造形したものです。(試合中に折れたため、画像では養生テープで固定しています。)

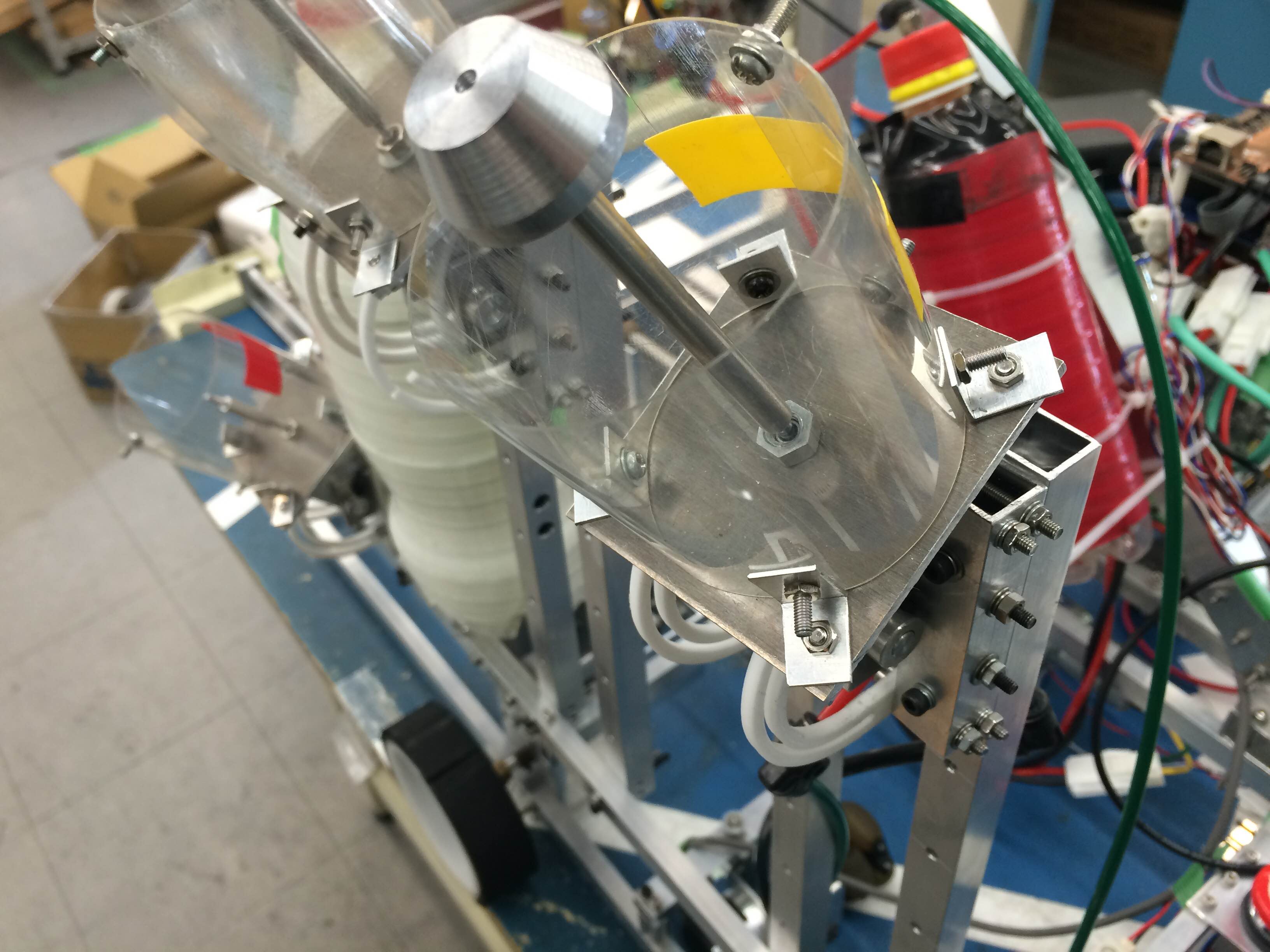
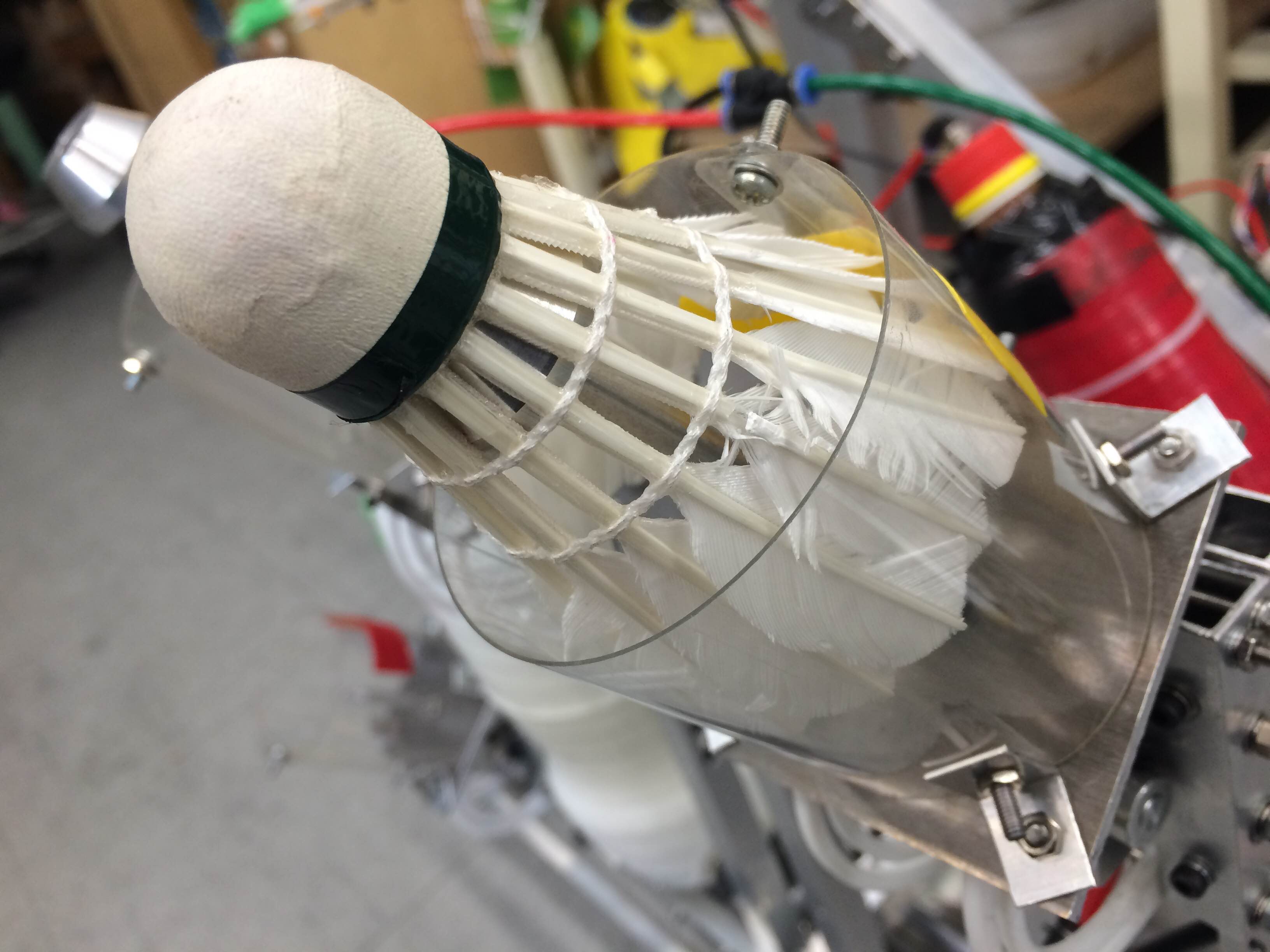
・ゴミ捨て(シャトル投げ)
シャトルはエアシリンダの推力で飛ばします。また、組立後も微調整が出来るよう、高さや角度を変えられる機構も付いています。
Aチームこと羽花繚乱は、決勝戦ですべての課題をクリアし、見事Vゴールを決めました!
チームメンバーが常に協力しあい、息のあったチームでした。
次回は、Bチームのロボットを紹介する記事を書こうと思っています。
最後に、4月15日(金)の18:00から、新入生向けのロボコンの説明会がありますが、授業と重なっている新入生もいらっしゃるようなので、16:30からも説明会を行いますので、ものづくりに興味がある新入生は是非どちらかの時間帯に10号館4階のMDLまでお越しください!
それでは、今日はここまで。失礼します。