4回生ハード班のN.kotaです.今回は我々が”京都光線”参加したキャチロボバトルコンテスト2024(以下キャチロボ)について活動報告とさせていただきます.
大会概要
キャチロボとは,主にマテリアルハンドを対象とした大会で毎年ワークがお菓子であることが特徴です.今年は栗山米菓様の「瀬戸しお」という煎餅です.このお菓子は三種類の味があり,それぞれパッケージの色が異なります.ボーナス得点を獲得するためにはシューティングエリアに配置されているパックに1種類3個ずつ計9個を正確に入れなければいけません.また煎餅は非常に割れやすいワークとなっていますので繊細な操作が求められます.詳しい大会内容はホームページをご覧ください.キャチロボバトルコンテスト~機械は人間の手を超えられるか~ (catchrobo.net)
チーム構成
ハード班2人,ソフト班2人の合計4人チームで全員が4回生で今回が最後の大会となります.役割分担としては設計が3名,制御が2名という振り分けで得意分野を活かすことはもちろん,新しい分野に挑戦するメンバーもいました.チームは4月に発足し,9月半ばの大会当日まで5か月近く活動しました.
コンセプト
リーダーは昨年度の大会にも出場していますが,その際にアームの合成不足により安定したハンドの操作をすることがとても難しい機体となってしまいました.その改善点も含め以下のコンセプトを決定しました.
・高剛性
・軽いハンド
・既製品を用いた整備性向上
・完全自動制御
これらのうち完全自動制御に関しては本番はお見せすることが出来ませんでしたが,練習では自動制御で30点ほど獲得することが出来ました.詳しくは後述いたします.
ハード面ではコンセプトを概ね満たすことが出来たといえる機体に仕上がりました.こちらも後述いたします.
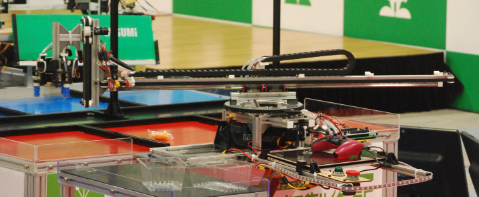
アーム

アームはリニアガイドとターンテーブルを使用したr-θ座標のものを採用しました.
当初は操作性が良く,操縦がしやすいxy座標系のアームを使用しようと考えていましたが,フィールドの干渉を考慮しr-θ系に変更しました.
アーム自体のフレームは高い剛性を確保するために20×20のアルミフレームを使いました.また,フレーム部以外は軽量化,加工の簡易化を狙い,3Dプリンターパーツを使いました.
ハンド
瀬戸塩をつかむ手段として,今回は吸引機構を採用しました.今回はワーク(瀬戸塩)がフィールド上にランダムに設置されていることや,瀬戸塩がフィールド上に固定されず置かれていることから,吸引以外の通常のハンドだと回収に時間がかかってしまうと考え,上部から押しつける吸引機構を採用しました.また,吸引機構にすることで,アクチュエータをハンドにつけずにすみ,かなり軽量化ができました.
実際に動かしてみると,少し吸引力が低いことで回収できない瀬戸塩もありましたが,概ね回収することができました.

制御
今回はルールで,三色の同形状のワークを3つずつ入れることでボーナス点が追加されるというものがありました.なので,自動で動かす場合,ワークの色を認識する機能が必要でした.
当初,制御するにあたって,カメラによってワークを画像認識し,自動制御によってロボットの全自動化を目標としていました.瀬戸塩の画像を複数認識できるようにモデル訓練させました.
結果として,自動でかなりの精度で瀬戸塩を選別し回収することができるようになりました.しかし,色の認識には少し時間がかかってしまい,手動で動かすのに比べて遅くなってしまったため,本番は手動での操作になりました.

結果
大会はまず予選を行い,その結果で本線に進むことができます.予選の結果は6位で決勝トーナメント進出を決めました.以下が結果です.(お相手の得点忘れましたすみません)
1回戦:対でん&つー 終電出勤部さん 52点で勝利
2回戦:対ブレーキのない自転車さん 60点で同点(審査員判定で勝利)
準決勝:対大阪工業大学キケン部さん 51点で勝利
決勝:Re:Arcobalenoさん 60点で同点 再試合の結果60対62で敗北
結果としては,準優勝に終わりました.優勝できなかったことは少し残念でしたが,強いチームが多数集まる中,この結果を残せたので良かったです.
大会を通して
思うように行くことばかりではありませんでしたが,約5ヶ月間の開発をやりきることができました.私たちは4回生でそれぞれ違う進路を持つ中で,ロボコンができる最後の機会で準優勝という結果を残せたことは本当によい思い出になったなと思います.
最後まで見て頂いてありがとうございました!