はじめに
前回は何の記事を書いたか覚えていませんがお久しぶりです、スライドレールです。
私は今までさんざんリーダーをやってきたおかげでろくに設計をせず、設計に対して苦手意識があったためそれを克服するために出場を決意しました。
ひとつ前の記事でずしが宣言した通り、今回は初手ハンドもといMainhandについてあることないこと書ければと思います。
それでは早速行きましょう。

Mainhandについて
概要
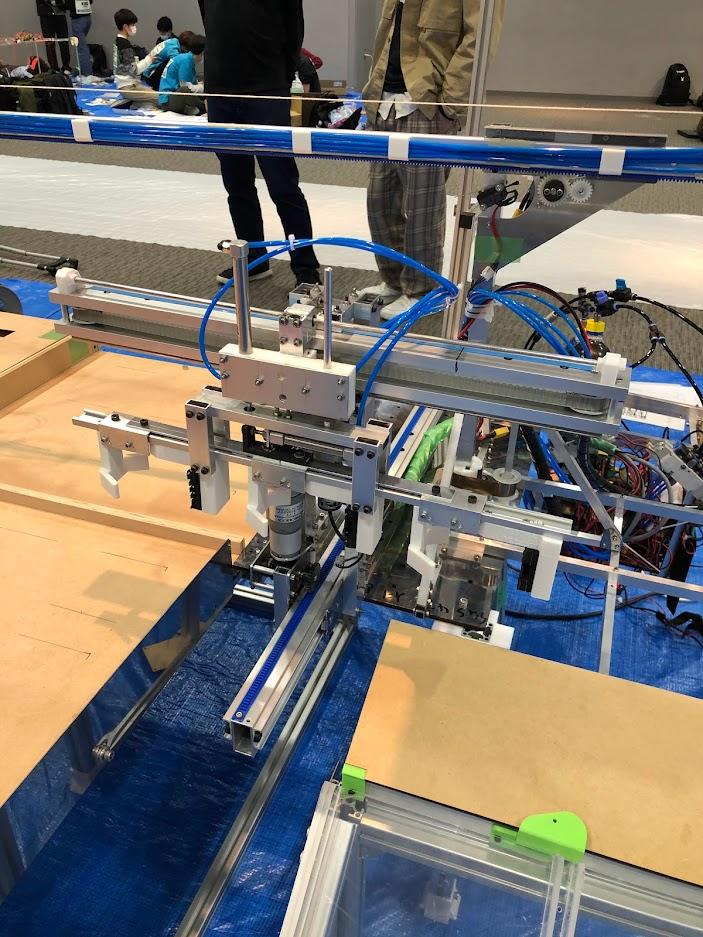
MainhandのCADを下に示します。

図中右側をX軸正、それと直交し手前側をY軸正、上向きにZ軸正と取ります。
Mainhandには大きく分けて3つの機構が搭載されています。
初手で素早く動く必要があるX軸方向ガイド、素早く動く必要はないが荷重に耐えられる剛性のあるY軸方向ガイド、ビスコを3つ同時に取得できるハンドの3種類です。
以下でそれぞれについて詳しく説明します。
とはいっても設計について詳しく書くと終わらんのでそこそこで。
X軸方向
X軸方向のガイドを設計するにあたって決めたコンセプトは以下の通りでした。
- 左右対称フィールドに対応
- ハンドの移動範囲の中心と、モータマウント部とを合わせる
- 動作を左右で反転させるだけでよい
- 初手ハンドとして用いるための素早い動作
- アクチュエータを減らすためにモータ一つ
- 移動距離が長く、マウント部にかかるモーメントを削減するためマウント部を中心に両側に移動できるハンド
- したがって動作はフィールドとの関係上、移動限界の繰り返し往復運動
- ビスコを取りに行く、所定の位置に納品、ビスコを取りに行く、所定の位置に納品…
- 常に動作し、移動距離も長いことから振動に強く
工夫した点は何といってもその動作です。
本番の動画を見てもらうのが一番手っ取り早いですが、Z軸方向に伸びている支柱を境に左右にハンドを運ぶことができているのが確認できるかと思います。
アクチュエータはコンセプト通りモータ1つですが、この動きを再現できているのは2つの機械要素のおかげです。
このガイドはベルトとラック&ピニオンを採用しています。
モータでピニオンを回してガイドに固定されたラックを動かします。
この時アイドラで支持されたベルトはガイドと一緒に動こうとするんですが、1点をモータマウントに、もう1点はハンドに固定されていることで動力を伝えます。
よってガイドも移動するし、同時にハンドも移動するといった構造です。
言葉だと多分わからないと思いますが…まあ倍速倍ストロークなんだなって思ってもらえれば十分です。
図を見れば明らかですが、端点まで移動したときにX軸ガイド固定部にはかなりのモーメントがかかります。
これに耐えられるように図では見えませんがステンレス製のスライドレール、摺動テープを使った摺動面でのモーメントの受け等工夫してあります。
Y軸方向
Y軸方向のガイドを設計するにあたって決めたコンセプトは以下の通りでした。
- すべてのビスコを回収できるだけのストロークを持つ必要がある
- フィールドより最も離れたビスコ間の距離(最も遠い面同士)は859 mmと非常に長い
- この時点でラック&ピニオンを使うことはほぼ確定
- 速度はそこまで求めない
- 初手さえ早ければいいのでY軸に移動させるときは3分以内に収まっていればよい
- ある程度の重さをもつ上部を支える必要がある
- モーメントや荷重に強いガイドが必要
- かつスムーズな動きが求められる
- ローラースライドレールを検討中
- ある程度精密な位置合わせが必要
- ハンドのクリアランスで吸収することもできるのでそこそこでよい
- 位置合わせは基本的に人間が目で見て行う
- 用いるアクチュエータはモータ1つ
工夫した点は剛性を稼ぎながらスムーズな動作を得るためにローラースライドレールを採用したことですかね。
名に恥じないように各所にスライドレールを使えて満足です。
ラック&ピニオンを採用したとてもシンプルな構造なので特に書くことはありませんが、あえて挙げるのであればマイタギア(傘歯車)を使って駆動用のモータを立てていることです。
初めから後々立てることになるだろうと思っていましたが、初めは簡単に設計するためにピニオン直刺しでした。
ただやはり他のハンドやフィールドとの干渉の問題で立てることになりました。
傘歯車は初めて使いましたが、思ったよりも素直に使うことができて驚いています。
ハンド
ハンドを設計するにあたって決めたコンセプトは以下の通りでした。
- 初手ハンドに用いるためなるべく素早くかつ簡単な動きで保持、リリースが可能
- なるべく軽くしたい
- 用いるアクチュエータは2つ
- ビスコをZ軸方向に持ち上げるためのエアシリンダ
- ビスコをつかむためのエアシリンダ
- X軸方向ガイドの終端位置にて回収、納品ができるように設計されているので決め打ちで動作させるだけでよい
小さくて見づらいかと思うので拡大した図を示しておきます。

コンセプトに従って設計したビスコを3つ同時につかめるシンプルな構造のハンドです。
特に目立つ機械要素も採用していません、エアシリンダとリニアブッシュぐらいです。
色のついている部分は3Dプリンタ製のパーツで、大会前日に爪先のみ変えられるように取り外し可能な設計に変えたりしました。
見えないですが便利なパーツとしてインサートナットを挙げます。
その名の通り樹脂に熱圧入して使えるナットです。
重量は増えますがはんだごてを使えばインサートが非常に簡単で、耐荷重もかなりあります。
固定に手間取る3Dプリンタパーツですがこれを使えば簡単に固定ができるようになります。
CADには表れていませんが、爪先にはスポンジを付けました。
これで3つ同時につかめるようになっています。
研究で3Dプリンタパーツを設計することが多々あるんですが、キャチロボに挑戦していたおかげで設計力が向上していて、印刷しやすい工夫などを盛り込むことができるようになっています。
その他
大会に参加しているMainhandは2号機という扱いです。
1号機は大会1か月前ぐらいに形にして、発生した問題点を洗い出し、それらを解決したものを作りました。
形はそこまで変わっていませんが、大きな問題が残らずに大会に出れたことがBest4という結果につながったと考えています。
そんな中で一つだけ解決しきれなかった問題がやはりモーメントでした。
X軸方向ガイドにはそこまでダメージはなかったんですが、Y軸方向で問題が発生することがありました。
Y軸方向ガイドで使ったローラースライドレールの固定場所が足りず、X軸方向ガイドの支柱ごとMainhandがたわむという現象が試合中でも発生していることが確認できるかと思います。
その為繰り返し激しい動きをし続けると把持したビスコがどこかに干渉する可能性も残っていましたが、そこはずしの操縦テクニックで何とかごまかしてました。
今回はスペース上厳しかったですが、やはりでかいモーメントがかかるときはガイド間を空けるとか、荷重を受けられる点を増やすなどの工夫が必要ですね。
おわりに
以上少し文字が多くなりましたがMainhandの解説でした。
私としては自分たちで考えたものが形にできて、大会でもそこそこの好成績を収めることができたので満足しています。
RC20に参加することができなかった分、ロボコンや大会の楽しさを経験することができて本当にいい機会でした。
…が、やはり研究しながらロボコンもやるのはなかなか時間の確保が難しいですね。
私がロボコンでブログを書くのはおそらくこれで最後ですが、今後のキャチロボのルール次第では面白そうなら同じ代のやつらと参加を検討するかもしれませんね。
それではまたどこかで。
