初めまして、1回生ソフト班のみことです。
私たちfortefibre21生は関西春ロボコン2022に参加してきました!
この記事では、チーム『モタモーター』として関西春ロボコンに参加してきた活動報告をしていきたいと思います。
関西春ロボコンとは?
関西春ロボコンは技術の向上や新人の育成を目的として、 大阪大学Robohanさん、同志社大学ロボット研究会さん、そして当プロジェクトによって開催されている大会です。第5回目となる今回は計4チームが参加し、白熱した試合を繰り広げました!
ルール説明
今回のルールは、シャトルやボールといったワークがフィールド上に散らばっており、そのワークを指定の箱の上にどれだけ片付けることができるのかというものです。ワークが置かれた箱の数や箱の表裏など様々要素で得点が変わり、3分間で何点稼げるかを競います。さらに、4つ以上のワークを動かしてしまうと「強制リトライ」されてしまうので、様々な戦略性が求められる大会になっていました!
さらに詳しく知りたい方は、関西春ロボコンHP RULE&FAQへどうぞ!(大会の公式HPへ飛びます)

チーム&機体紹介
私たちのチームは、ソフト班3人、ハード班5人で構成されおり、モタモーターという名前で大会に参加しました!
「モタモーター」というチーム名は、チーム名を決める話し合いの中で迷走した結果、一番かわいい名前に落ち着きました()
それではチーム紹介について書くことがなかったので、さっそく機体を紹介していきたいと思います!
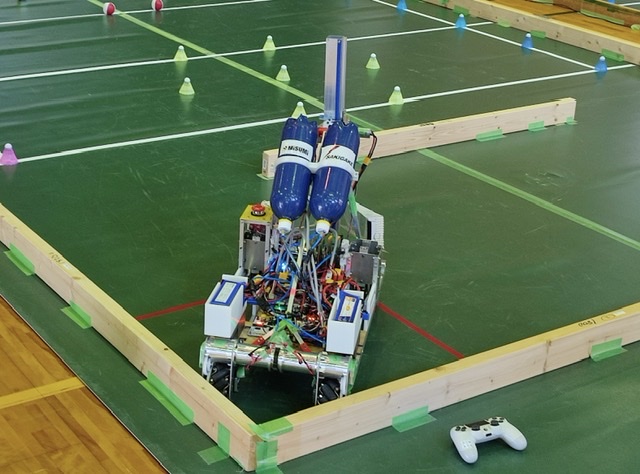
私たち『モタモーター』が制作したかっこかわいすぎる(親バカ)ロボットはこちらです!!

この機体は主にワークを箱の上に置くための上部機構と木枠を乗り越えることができる足回りに分けることができます。
上部機構
上部機構にはサーボモーターを利用しており、開閉の角度を自由に変えることができます。
そのため、ボールをとる角度やシャトルをとる角度など様々な状況に合わせて角度を調整できる機構になっていました!!
ただ、実際は角度の研究のための時間がとれず、そこまで角度の種類を増やすことはできませんでした・・・
また、ハンド部分を透明にすることで、操縦者がワークを扱いやすいハンドになっています。

足回り
足回りは、乗り越えを実現するためにメカナム四輪を採用しており、大きく分けて補助輪・ロック機構・乗り越え機構の三つの機構が搭載されています。
- 補助輪
補助輪は、足を上げている際に機体の転倒を防止するために搭載されており、エアシリンダーによって直動的に動く二本の補助輪で機体を支える形となっています。
また、荷重を機体で受け止めるためエアシリンダーが水平方向に動くようになっており、スライドレールを用いることで水平方向の動きを鉛直方向の動きに変換しています!

- ロック機構
エアシリンダーを用いたロック機構は、足回りが走行中に広がらないようにするために搭載されています。
また、ロック機構にタッチセンサーを搭載することで、ロックの状態を制御的に把握し、安全に乗り越えすることができる機体となっていました!

- 乗り越え機構
乗り越え機構は、サーボモーターの回転で前後のメカナム部分を持ち上げることで、夢の木枠乗り越えを実現しています!!!
また、木枠を乗り越えるために十分な足回りの高さを確保したことで、ワークの上を乗り越えながら縦横無尽にフィールドを走ることのできる機体になっています。
そして、メカナム部分に測距センサーを搭載することで、木枠との距離を測り、自動乗り越えができるようになっていました!
ただ乗り越え自動化は、実現はできたもののセンサーや戦略の問題で、本番では実装されませんでした・・・

大会結果
大会結果は、4チーム中2位という結果でした。悔しい結果でしたが、チーム全員、大会を通じて様々な学びを得ることができました。
次の大会では優勝できるよう今回の悔しさをバネに頑張っていきます!!