はじめまして、一回生ハードのサクです。
新学期応援セール📣では連絡係をしてました。
今は関東春ロボコンが終わり、興奮状態です。
本当に幸せな気持ちでいっぱいですが、関東大会のブログを書いてくれる人にそのあたりは書いてもらうことにします。
なので今回は少し前に戻って関西春ロボコンに出場した報告書を書かせていただきます。
チームについて
チーム名はメンバー内アンケートでチーム名を募集して、多数決で決めました。なんでこの名前になったのかは多分その場のノリです。ただ提案者曰く📣がなによりも大事みたいです!
チーム内のメンバーの内訳はハード5名、ソフト4名になっています。
自動化を目指して機体製作に取り組みました。
機体について
今回の目標は「勝利!」です。
陳列タイムは「ハット4つで115点を確実に取る!かつ125点を狙える機構!」、販売タイムは「どちらも持てるハンドで様々な置き方に対応」を目指しました。
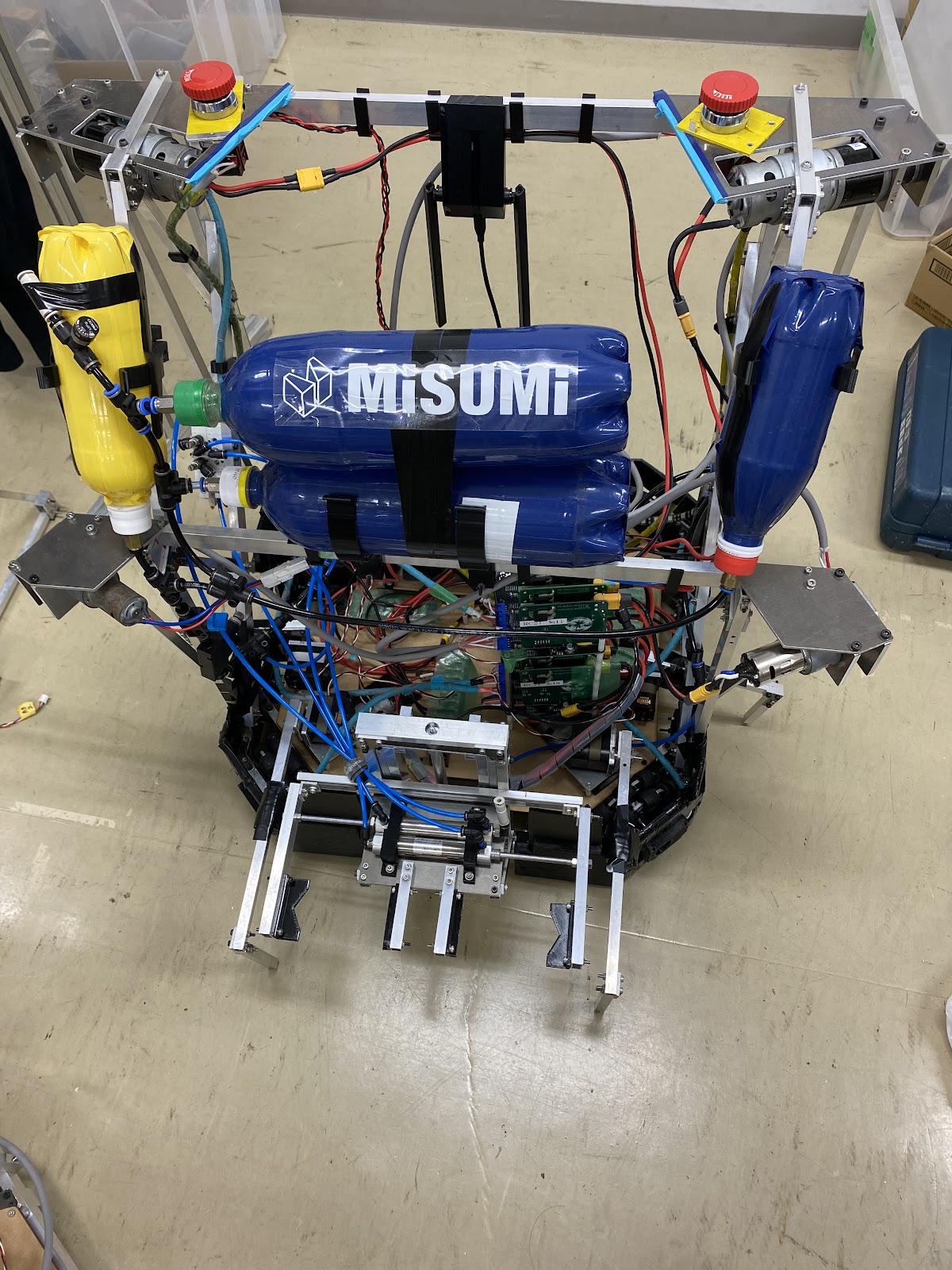
実際の機体がこちらです。

機構ごとの説明をしていきます。
まず「剣」回収、設置機構です。
この機構は「剣」を2本保持することができ、木枠を超えることが出来ます。一本ずつ置くことができ、エアシリンダーだけで動き、場所をあまりとらない、そして整備する必要が少ないと優秀な機構だと思います。

次に「ハット」回収、射出機構です。
この機構は陳列タイムに「ハット」を回収して射出することができます。回収も射出も同じ機構で出来ることが魅力です。機体に4つ搭載されていて連射できるので集荷室との往復をする必要がありません。
しかし、この機構は「ハット」の形状や位置、モーターの回転速度、空気抵抗、などさまざまな条件に「ハット」の飛び方が起因するためかなり運要素が強い機構となりました。

最後に「ハット」回収機構です。
販売タイムに「ハット」を引きずるだけの機構ですが、簡単かつ場所をあまりとらないため4つ搭載することが出来ました。

大会について
結果としては3位でした。
準決勝で「ハット」が一つも入りませんでした。それまでの試合や3位決定戦では2つから3つ入っていたので運要素をなくせなかったことが問題だったと思います。どちらかと言うとそこまで2つ3つ入れていた操縦者が本当に上手でした。
ハードとしては設計的な反省点はたくさんありますがいったんそれは置いておいて、3位なのになぜか関東大会出場権を得たのでやれるだけのことをやりたいと思います。