お久しぶりです、SRC2022赤組さんのブログを担当した栗毛です!今回も引き続きブログを担当することになりました。この機会に、もっと面白く、分かりやすいブログを書いていこうと思います。チームの中心で、制御に携わった者としてトイトイと制御のエピソードを中心に話していこうと思います!
チーム、「トイトイ」とは……
トイトイの由来は麻雀の役名の一つである「対々和(トイトイホー)」から来ています。おもちゃの「toy」と掛けてあり、麻雀を皆とやりたい人たちによって考案されました。

チームメンバーはハード4人、ソフト5人の計9人で構成されています。ハード、ソフトともに一名がリーダーとなって指揮を執り製作を続けてきました。
機体紹介

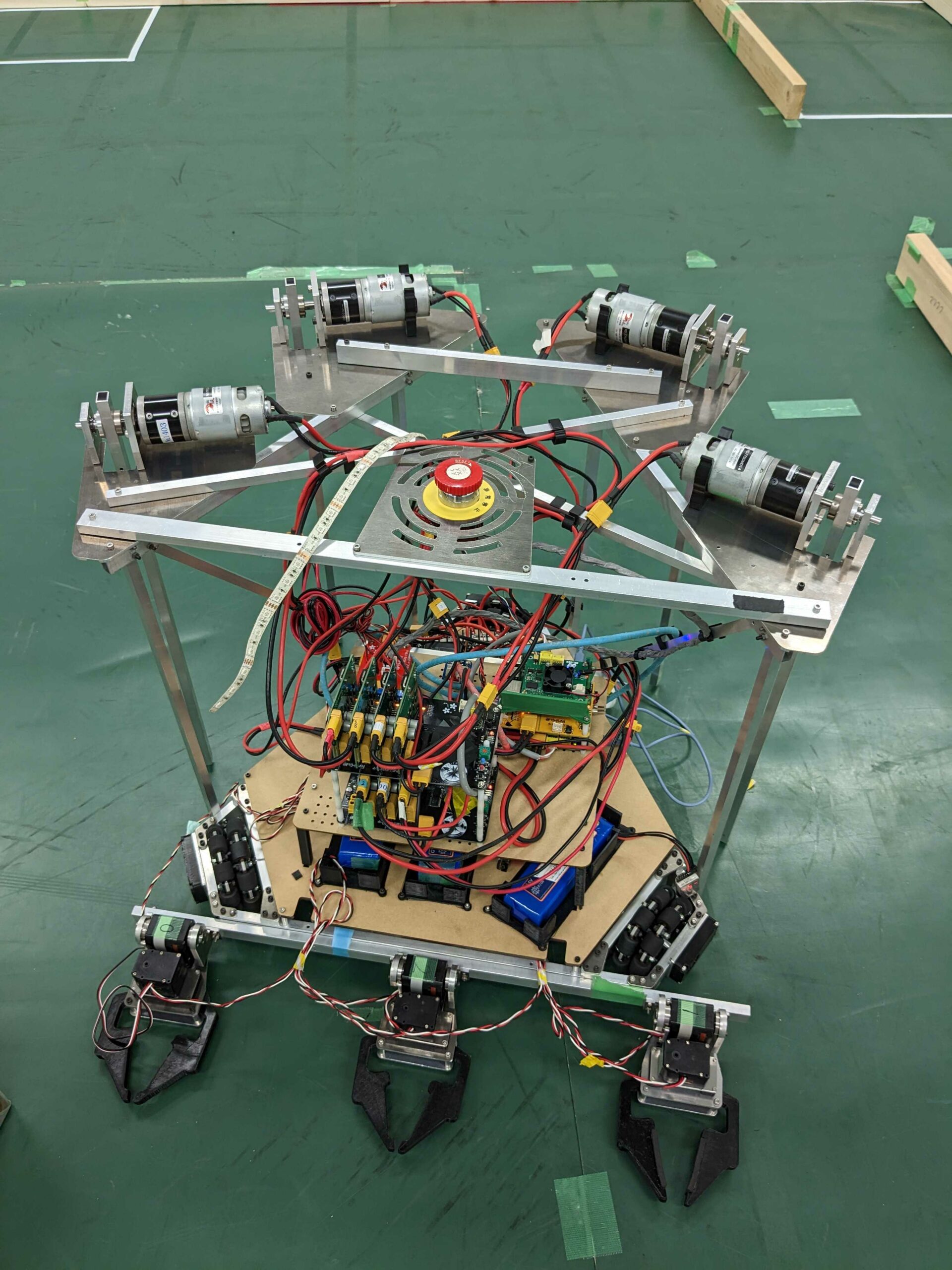
今回の機体はチームで1台というルールで、すべてのタスクを1台でこなせる汎用性がカギになりました。機体は大きく分けると「足回り」「兼用ハンド」「射出ハンド」の三つに分かれます。
足回りには3輪オムニホイールを採用しました。射出の都合で足元にスペースが欲しかったため4輪は不採用でしたが、もともと高重心設計であること、加工精度の低さなども相まってより操作性の低い不安定な足回りになってしまいました。
大会を通じて、足回りの安定性の重要性を痛感しました。

↑の三つ連なってるハンドが兼用ハンド。今回つかむ必要がある帽子とペットボトルをどっちも持てるようになっています。クリアランスが広く位置取りが多少ガバってもワークを持てる操縦者に優しい仕様(にしたかった)。

長い棒が上からぶら下がってるのが射出ハンド。帽子を最大で3mほど飛ばすため考えられたのがこの下投げの機構でした。モーターを上部に4つ取り付けているため高重心も極まってます。本番ではそこそこ上手く動いてくれて、おかげで当日では最高得点の210点を出すことができました。

制御について
今回の制御の役職は、「回路・配線」「足回り」「射出機構」「兼用ハンド」「通信」に分かれて進行しました。しっかりと役割分担が出来て、チームの運営としては良かったかなと思っています。
今回の制御では、ROS 2を使ってみました!英語の公式ドキュメントとかを読んだり、環境構築に苦労したりとプログラミング以外の部分で体力をごっっっっっそり持っていかれましたw
ハットの射出機構の制御もハードの皆さんに助けられながら精度を上げていくことが出来たと思っています。機体のメンテナンスをしてもらったハードにはとても感謝しています。
今回ハンドの数だけで7個もあるので、コントローラー(Dualshock4)のボタンを殆ど使い切りました。操縦者には頑張って操作方法を覚えてもらうことで無事に(?)思い通りの制御が出来ました。
大会まで
機体は1月中には完成していました。そこからはソフトがデバックをしながら理想の動きをさせるための毎日でした。とても忙しい毎日でしたが、最後まで部室に来て調整を手伝ってくれたからこその210点という高得点とベスト8を飾れたと思います。
次の大会では、反省点も踏まえて頑張っていきたいと思います。
最後まで読んでいただきありがとうございました。