こんにちは。2回生ハードの干からびた雑草です。この度私たち2回生は9/8に開催された東海地区交流ロボコン2024に参加してきましたのでそのっ活動報告をさせていただきます。お付き合いのほどよろしくお願いします。
結果について
結論から言うと初戦敗退でした。悲しいね。うまく動けばベスト4はいけるかなーと思ってたんでつらい。まあこれが自動機の厳しいところですよね。
チーム構成
ハード3人、ソフト4人でロボットを製作していました。春ロボの時はハードは9人もいたのにどこにいってしまったのでしょうか。神隠しか? 機体の製作は期間内になんとか終わったんですが本当に開発できるギリギリの人数って感じでしたね。
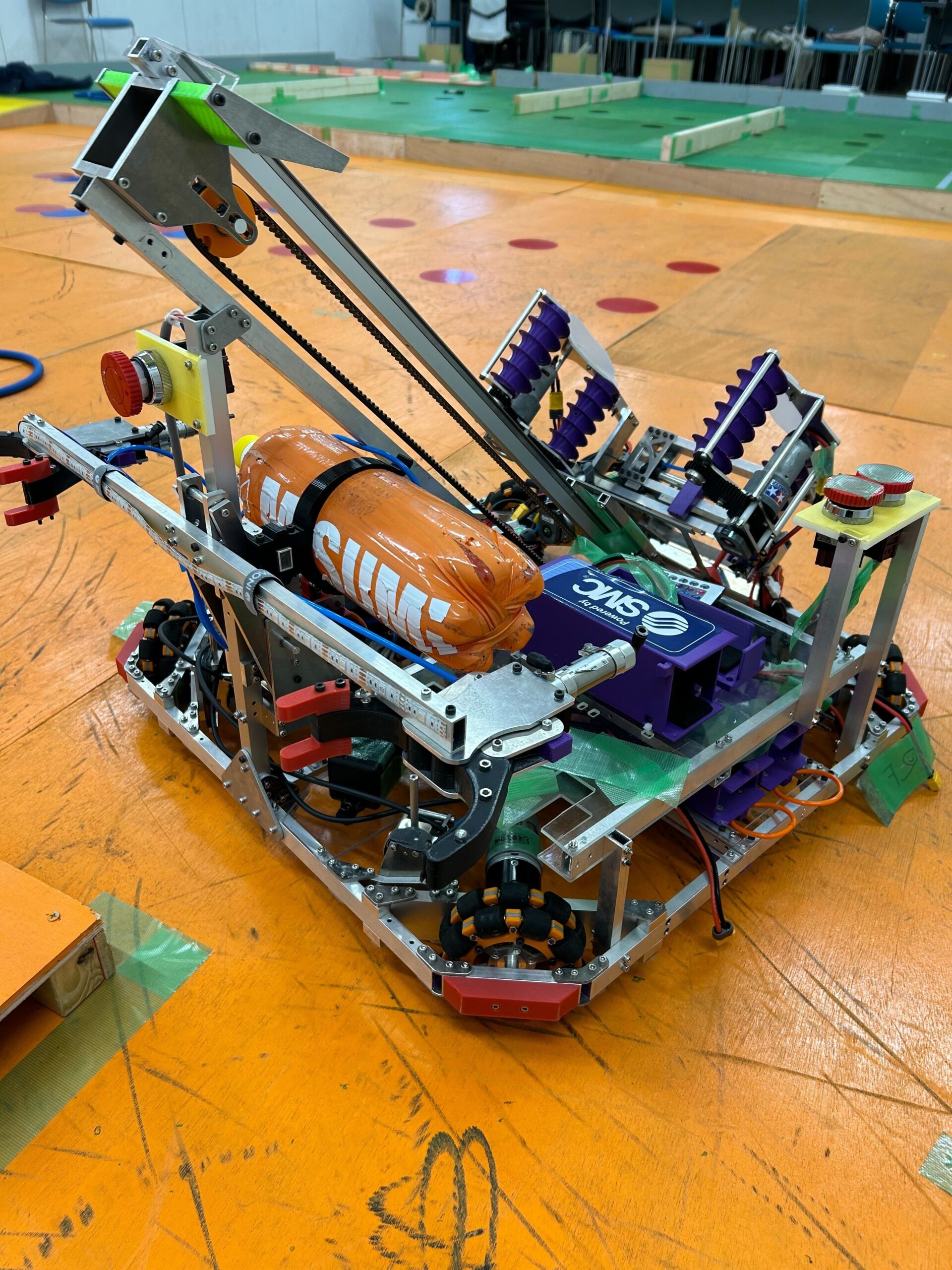
機体について
大まかに苗回収機構、リング射出機構、リング回収機構の三要素で構成されています
苗回収機構
平行リンクで初期制限に収めつつ苗を穴から引っこ抜いて置くことができるようになってます。苗をつかむのはエアシリンダを使っています。単純な機構なのでテストランや試合中も安定して動作してくれました。

リング射出機構
ベルトでの直動射出です。モーターをかなりの速さで回していたので基盤やモーターがよく不具合を起こしてました。モーターが制御中に2個燃えました。本番で動きを見せることがなかなかできなかったので残念です。

リング回収機構
エアシリンダで縦に5本積まれたリングを把持し、ハンドについている螺旋のパーツを回すことでリングを射出機構の台に1つずつリングを落とす機構です。練習ではリングの個体差に苦しめられていたのですがテストランではしっかり機能していました。

制御について
今回はメイン処理を行うデバイスとして、Rock5を選定しました。フィールドが二段になっている関係で、センサとしてLRFを2つと接地エンコーダを使用したのですが、部にあるRaspberry Pi 4では性能が足りず…ということでより処理性能の高いこの子にしました。ビルドが速くていいですね、この子。
制御は春ロボと変わらずros2を使用し、今回新たにLRFを使ってのポール検出、自動射出の開発に挑戦しました。ポール検出は時間の都合上断念しましたが、変わりに自己位置からポールの位置を割り出すことにしました。結果としては上々で、そこそこの制度になっていたと思います。
基板開発
今回、私達は今大会に向けて新たに2つの基板を開発しました。
サーボ基板
サーボモータを動かすことができる基板です。サイズが50×50 mmとこれまで弊部が開発してきた基板に比べ、非常に扱いやすいサイズとなっています。まあ、素子がなくて大会では使われなかったんですがね(´・∀・` )
PCメイン基板
PCでCAN通信を行うことを可能にする基板です。これによってPCをメインとして機体を動かすことができます。更に、PCからロジックに電源供給できるのでとても便利です。
まとめ
結果としてはあまり芳しくないものとなってしまいましたが、他の機構を模倣し、技術を研究してみるという経験は大変貴重なものになったかと思います。作成した基板や射出の技術、経験した失敗等をnhkへ活かしていければと思います。