悲しいことに、設計にほぼ携わっていない私、うらら君がブログ担当となりました。締め切り少し前にメンションが飛来、他の課題と相まって私の3連休は粉微塵になろうとしております。(主に己の計画性のなさのせい) こうしてブログを完成させるべく、うららはネットの海へと情報を探しに行きました。
機体の命名
お名前 ししし まさか獅子と司るの司でしししなんてことはないです。書いてて適当に思いついたことは後付けでも理由になったりするのでしょうか。そんなことを考えながら機体の紹介に移ろうと思います。
機体について

まず、結論からいいますと、東ロボの数日前、部内全体でコロナが流行り、大会参加は見合わせることとなりました。これでは設計者も報われぬ。もっとも、大会前にモータにほぼ常に負荷がかかるという問題が発生している時点であまりよろしくなかったのですが。まあそれは置いときましょう。9月後半に部内大会という形で機体が供養されることになったので、設計者にもうひと頑張りしてもらい、我々加工班はおとなしくnhkに向けたアイデアだしとかをしておりました。図面は寝て待て。

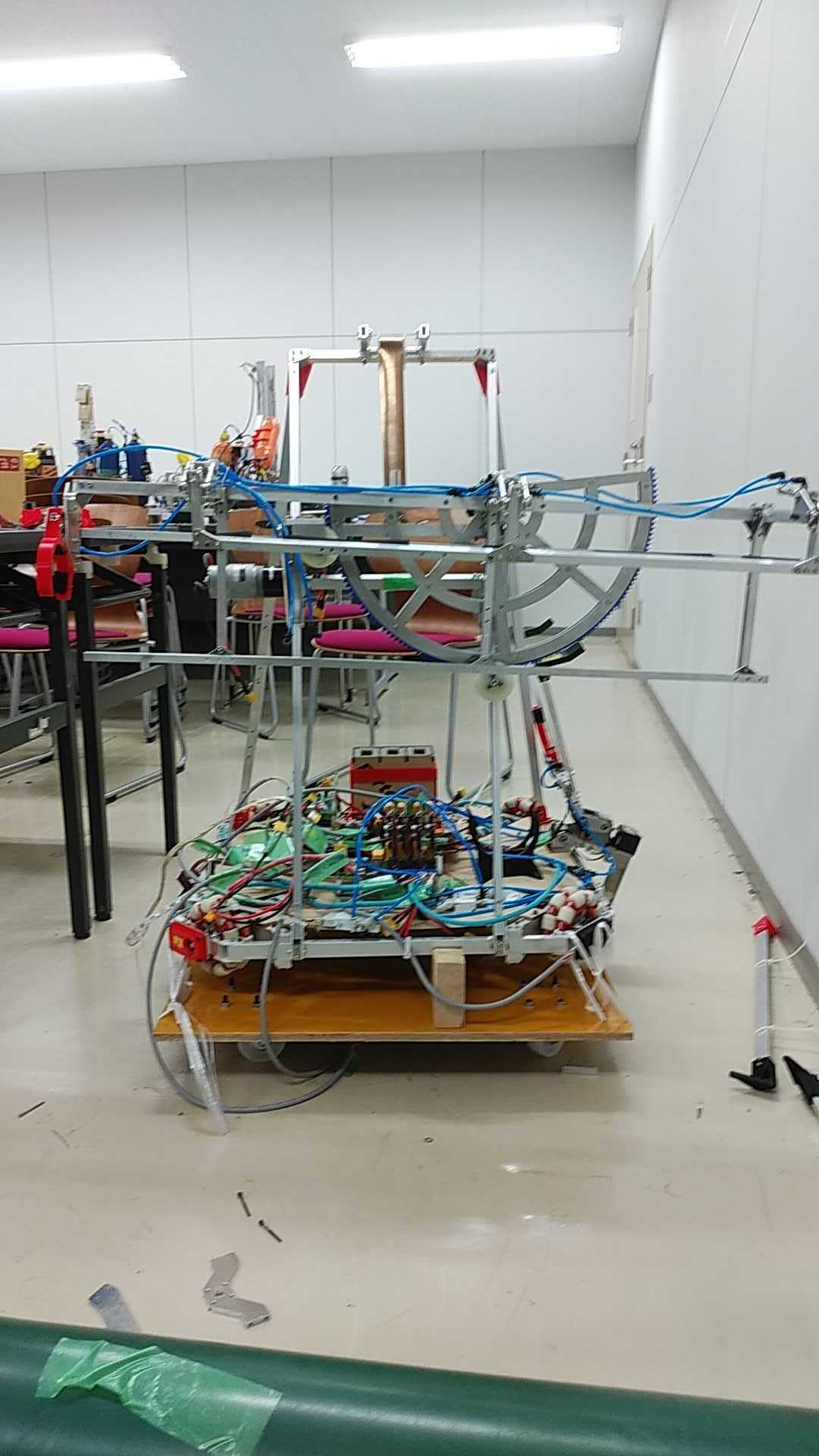
ということで改良後の様子がこちら(下図)。ハンドに定荷重バネを設置して常にかかる力を低減させました。また、その他微調整も行いました。

調整後はうまく機体が動きました。ただ、機体についていろいろと言われたことがあります。
問題点?
設計上の問題と言えばいいのか分かりませんが、どでかいハンドの部分が挙げられます。ハンド一つで上昇、回転を同時に行うため、2dcadの時点で展開制限の確認を行う必要があります。この作業がとんでもなく大変だったようです。一人にかかるタスクの量が多くなりすぎたこと、そしてそのタスクが分割できないものだったことが問題だと指摘されました。これにより、予定より設計の期間が遅くなりました。その結果加工、組み立てが遅くなり、新たに出た干渉などの問題に対応するのが遅れ、結果大会が開かれる日には制御が完璧ではない状態でした。
いろいろあって
なんだかんだ書き込みましたが、僕はこの機体が結構好きです。自分が加工したものが多少でも含まれているなら、よほどでない限り嫌いになる人はいないと思います。最速の機体達には及びませんが、それでも達成速度は40秒程度で出来る力があります。今度の大会ではタスクの分散や早めに機体をあげるなんかを出来ればいいですね~