初めまして,4回生にして初めてブログを書くことになったダツネです.前回に引き続いて第11回キャチロボバトルコンテスト出場機体の紹介をしていこうと思います.今回は共通エリアに置かれたビスコの取得を目的とした”共通ハンド”についてです.

前提条件
まず,我々は同時に動く2本のハンドの干渉対策として各機構で高さ方向のレイヤー分けを行いました.その中で共通ハンドは上から2番目という位置,実数値でいうとロボットベースから高さ350 mm以上という領域が与えられました.しかし,掴んだビスコを350 mm以上上昇させるのというは現実的ではないので,
- ハンド先及びビスコが自陣エリア上空に侵入することなくシューターに納品できる
- それ以外の部分は原則350 mm以上をキープする
という制約条件のもとで設計していく流れとなりました.
機構紹介
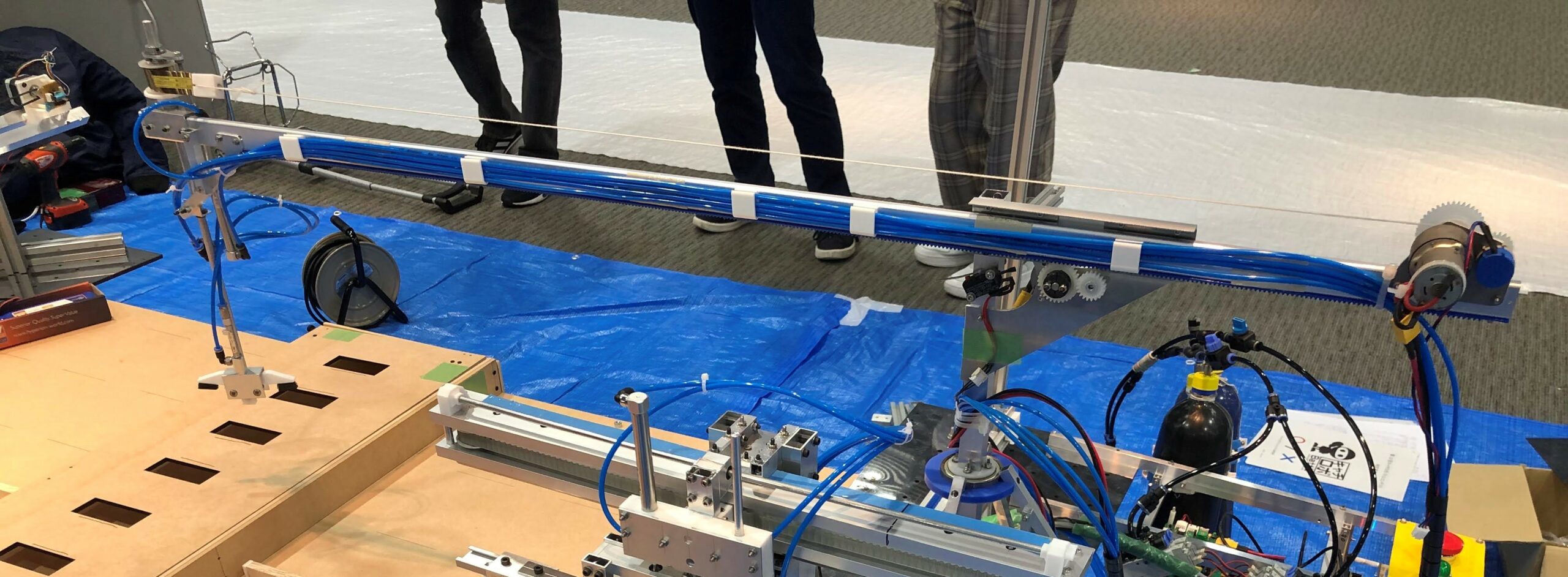
そして出来上がったものがこちらになります.
機構の自由度は,機構基部にr-ψ(yaw)軸,ハンド支部にz-ψ軸の計4自由度+ハンドの開閉になっており,ハンド先が独立して回転することによりビスコの向きをそろえて納品できるようになっています.以下,自由度ごとに詳しい説明をしていきます.
r軸
単純なラックアンドピニオンです.アクチュエータはRS-540,センサにはオムロンエンコーダ+リミットスイッチを使いました.これ以上書くことないので次行きます.
基部ψ軸

20×20の角パイプを支柱として,自作歯車を差し込んでいます.アクチュエータは(画像とは違いますが)RS-380,センサにはAMT102+フォトインタラプタを使いました.角パイプのスラスト負荷は円錐ころ軸受で受けています.図中に見える定荷重ばねはバックラッシを打ち消すために取り付けましたが,実際は振動が酷かったので別の対策が必要そうです.トラス(※トラスではない)と支柱の接続部分には
↑こんなパーツが入っていますが,まあ頭の悪い設計なのでマネしないでください.加工コストが終わってます.
z軸

エアシリンダで動かしてました.以上.
一応補足しておくと,ハンドとの接続はいもねじ1本で止めてるだけだったので,z軸の零点出しは10秒で終えられるようにしていました.
ハンドψ軸
定荷重ばねを引っ張って,その回転と同期させることでハンドを回そうとしました.が,健全な動きはしてくれませんでした.原因は定荷重ばねの牽引部にガイドがなかったことと,ハンド先の配管が引っかかりやすかったことにあります.ここは時間が足りなくて最終的に妥協した部分なので,ちゃんと動くように修正したものを遺していきたいですね.ちなみにアクチュエータはお気持ちカウンターウェイトとしてハンドと反対側の端に置きました.
ハンド

エアシリンダでラックアンドピニオン,爪は3dプリンタで作りました.以上.
総括
ここまで長々と書いてきましたが,実は全部意味がなくて.なんてったって自陣エリアのビスコ入れただけでシューティングボックスが溢れるんだもの.悲しいね(´;ω;`)
とはいえ全く動かない置物だったというわけでもなく,ロボコン人生最後に作ったロボットがちゃんと動いてくれたというだけでもう私は満足しました.RC20がなくなって成仏できないでいましたが,これでようやく成仏できると思います.
キャチロボ2021出場機体紹介はまだまだ続く予定ですので次回以降もお楽しみに