お久しぶりです。 四回生のフミです。 早いもので、ロボコンを始めてもう四年が経過しました。 ついこの間SRCで機体を動かしていたと思ったら、春ロボ、NHKも終わり、気が付いたら最後のキャチロボも終わっていました。 最近ロボコンと少しづつ距離ができてきたら、研究以外にやることがなくなって暇を持て余してしまうようになりました。 どうやらロボコンをしている間に趣味というものが消滅したようです。 残りの余生数十年をどう過ごせばいいのか、途方に暮れる毎日です…
さて、今回は第12回キャチロボバトルコンテストに出場したのでそのご報告になります。 今年のキャチロボは、ForteFibreからは2チームが出場しました. 私は「ロボコンリベンジャーズ」というチームで、ハードの相方と二人で出場しました。
結果からいいますと、6ポイント獲得、1ポイント減点で、5ポイントでの予選敗退となりました。 敗因は大会直前まで少し忙しくて、制御に手を付けたのが大会5日前だったことです.
やっつけで制御したためソフト的に誇れることがあまりありませんが、ハードウェア的には相方が最高の機体を開発してくれました(本当に申し訳ない)。
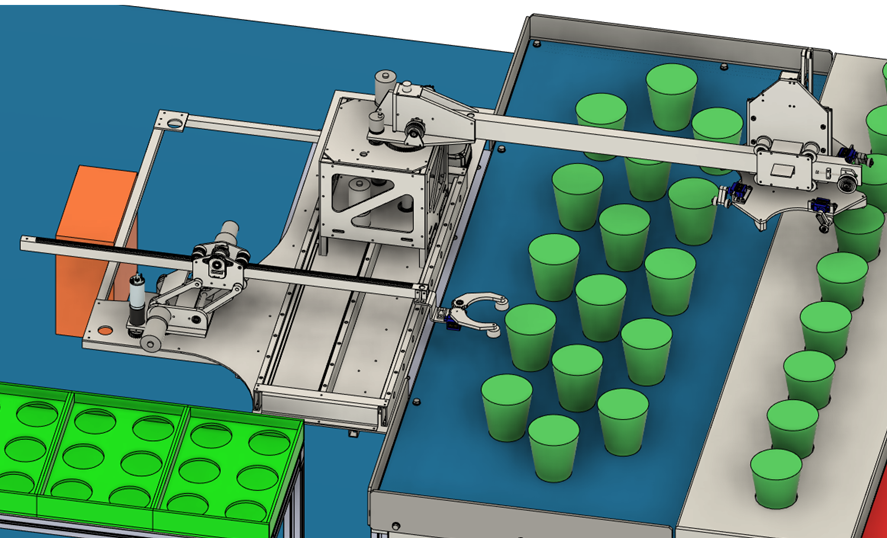
機体構成

まずは、機体構成からです。 機体は「凌雲」「閻魔」「疾風」と名付けた3つのロボットから構成されていました。
凌雲(Ryoun)
凌雲は共通エリアの妨害を行う、長いバーを持ったロボットです。 タミヤの540モータに角パイプとアングルを取り付けただけのロボットになります。 長いバーを下すことで相手チームの共通エリアでの回収を妨害する目的がありました。
予選では対戦相手との勝敗は関係なく点数のみで通過が決まる仕組みだったため、凌雲を使用することはありませんでした。 そのため、日の目を見ずに消えていったロボットです。
個人的にキャチロボでは妨害ハンドが大会当日に消し飛ばされるケースが多いように感じます。
疾風(Hayate)

疾風は、単一のハンドを持ったロボットで、Vゴール達成に必要なワークのうち1/3を回収できるロボットです。 このロボットは、閻魔と凌雲の共通エリア進入条件を最速で達成するために開発されました。 rθz座標系で動作する三自由度の機体で、軽やかな動きが印象的でした。
練習では、一つ目のじゃがりこを3秒でシューティングBoxに入れることができていました。
閻魔と凌雲とはコントローラが分かれており、試合本番では相方が操縦していました。
閻魔(Enma)

閻魔はフィールド内のすべてのワークを回収することのできるロボットです。 閻魔本体はスライドレールによって前後に動くほか、rθ座標系でハンドユニットが動作します。 さらにハンドユニットがZ軸方向に動き、ハンド先端が回転するという5自由度の構成です。
閻魔のハンドは一回につき、四つのワークを同時に把持することができ、それぞれのワークの把持・解放を独立して行うよう個別のサーボモータがついていました。
試合本番では私が操縦する予定でしたが試合直前にエンコーダのケーブルが断線してしまいました。 そのため、試合の初期制限に機体が収まらず、原点調整動作後にモータドライバへの給電を遮断することで、手動(物理)で初期制限に収めました。
相方の設計のここがすごい!!(鼻息)
今回、相方は本当に最高な機体を作ってくれました。 そこで今回はソフトの私から見た、「相方の設計のここが推しポイント!」について語りたいと思います.
設計思想
相方が設計時に一番こだわっていたのは、「いかに剛性を稼ぐか」でした。 剛性こそ正義といわんばかりに、ひたすら剛性のある機体を突き詰めていました。
結果的に、ソフト的には意図した通りに動いてくれる、非常に扱いやすい機体でした。
ジブクレーン方式のアーム!!
皆さんはジブクレーンを知っていますか? 田舎の駅などに行くとホームの横に置かれているこんな感じのクレーンです.

通常ロボコンではハンド伸び縮みさせたいとき、アームの先端にハンドを取り付けてアームを伸縮させることで動作を実現します。
そのため、アームの長さが長くなったりアーム先端の重量が重くなると、アームの剛性が足りずにたわんだり揺れたりしてしまいます。
ジブクレーン方式では、アームを非稼働にする代わりに剛性を確保し、剛性が確保されたアームの上をハンドユニットが前後することでハンドを伸縮させます。
キャチロボではアームのたわみが致命的になるケースが例年見られます。 アームを最大限伸ばした際にアームがしなってしまい、ハンドがワークに干渉してしまったり、たわみによって理論上の座標と物理的な座標に差異が生じてワークの取得に失敗してしまったりといった問題が発生しがちです。
そこで閻魔ではこのジブクレーン方式を採用しました。 その結果、アームがかなり長かったのに対して、制御中に一度もたわみが気になったことがありませんでした。 またアーム固定部の剛性を稼ぐことができるため、アームで使用する角パイプに15×10mmのものを採用し軽量化を図ることができました。
遊星歯車機構のθ軸
閻魔、疾風の両機体でθ軸には遊星歯車機構を採用していました。 大きな歯車を固定側に取付け、モータを稼働側に取り付けることで、大きな歯車にかかるモーメントが軸のたわみに影響しにくいよう設計されています。
また、(弱小ソフトなので詳しいことはわかりません……)

剛性を追求した閻魔!!
閻魔はアーム距離が長くわずかなたわみが大きく影響する可能性のある機体でした。さらに自動化を想定していたため、特に剛性を重視して設計されました。
極太θ軸
閻魔ではθ軸の上に3kg程度の機構が搭載されています。
さらに長いアームがついているため、θ軸にはスラスト荷重だけでなくアームによるモーメントも大きくかかります。
そこで、アームのモーメントによる荷重を効率よく受けるため、極太の長い軸が使用されています。
閻魔の立方体状のユニットの上下にベアリングがついており、アームユニットから伸びたθ軸がこの2つのベアリングによって受けられています。
このおかげで、当初懸念していたθ軸のぐらつきに悩まされることは一度もありませんでした。

頭のおかしいことに(誉め言葉)この軸の一番長い部分は両端がベアリング公差になるように加工されています。 この神加工はチームメンバー外の同期のハード班が手伝ってくれました。

剛性マシマシアームの根元!!
閻魔の極太θ軸もなかなか涎垂ものの機構ですが、剛性マシマシのアームの根元もなかなか魅力的です。
θ軸とアームの角パイプの締結を担っている部分なのですが、角パイプにかかるモーメントを一身に受けるため、特に剛性が高くなっています。
このユニットのNC加工は私が担当したのですが(Gcodeって実質プログラムだからソフトの担当ですよね?)、頭が痛くなる量の溝加工とねじ切りが施されています。
スマートな形状の肉抜きも相まって、ついつい撫でてしまう可愛さです。

同時回収を突き詰めたハンド
閻魔のハンドは、カラーエリアでは四つのワークを、共通エリアでは二つのワークを同時に回収できるように設計されています。
各ハンドでワークの回収ができるよう、マイクロサーボのMS90が取り付けられています。
サーボについたローラで風車型のハンド本体にじゃがりこを押し当てる機構により、じゃがりこ接地位置の誤差を吸収することができるハンドです。
ソフト的にはPWMサーボのケーブル(3線)×4+ハンド回転用のシリアルサーボのケーブル(3線)の計15本のケーブルを基板置き場からハンド先まで引いてくるのが大変だったことで思い出深い機構です。

必要十分条件を満たした疾風
ごつい閻魔に対して、疾風はとてもシンプルな構成でした。
個人的には疾風の方が好きですが、閻魔ほどエロい機構がないのが残念ですね……
疾風は相方こだわりの樹脂製ローラガイドを用いており、通常のベアリングガイドよりも軽量化しています。
また、θ軸の回転にマクソンを用いることで、非常に軽快な動作を実現しています。

簡単なセッティング!!

各ロボットは1枚のMDFによってロボット間の位置が固定されています。
MDFにはたわみ防止の角パイプのフレームが取り付けられており、角パイプに開けられた穴に通したねじとフィールドの穴を超ネジで6か所締結することで、一瞬でセッティングが完了する親切設計です。
素晴らしいですね!!
センサレス!!
センサレスは言い過ぎでした…ごめんなさい(なら言うな)。 ただ疾風と閻魔の二機体で、原点調整用のフォトインタラプタは合わせて一つしかついていません。 唯一のフォトインタラプタは閻魔のθ軸に取り付けられています。 フォトインタラプタ以外のセンサは、各モータにつけられたエンコーダのみでした。
これはセンサの故障によって試合ができないというリスクを極限まで減らす目的でした。(もっとも、エンコーダの故障で敗北したのですが……)
基本的に軸ごとにモータを動かし、物理的にモータが動かなくなる位置を原点として取得していました。 このような構成をとったのは、これまでのロボコン人生の中でセンサの故障でつまずく事例があまりいも多かったからです。
RC21でテストランの際に原点調整がうまくいかず機構のセットアップが完了しなかったために機体のコードをその場でいじって機構を一つ無効化する必要があったり、RC22で後輩が作ったロボットの原点調整機構が壊れてしまい、何もできずに終了してしまったという事例がありました。
エンコーダによってモータの停止を検出する方法であれば、例えばエンコーダが故障して信号が来なかったとしても原点調整のプロセスを完了することができます。 また、試合前に最低限確認する項目がフォトインタラプタ一つで済むというメリットがあります。
実際、予選でエンコーダが動作しなかった時も原点調整のプロセスは正常に終了しました。
せっかくですので、開発時のセットアップ動作の様子の動画を載せておきます。
もっとも、この動画は開発時に撮影したもののためセットアップ動作終了後に初期条件にロボットが収まっていません…… また、本番ではこの2倍程度の速度でセットアップが完了していましたが、大会直前は限界を迎えて開発していたため撮影していませんでした。
終わりに
さて、まだまだ語りたいロボットの魅力があるのですが、ブログの締め切りの問題もありこの辺で終わりにします(執筆現在、19時間納期をオーバーしてます)。
最後に、キャチロボを共に戦ってくれた最高の設計者である相方と、一緒に作業しながら励ましてくれた頼もしい3回生のソフト後輩コンビ、そして応援してくださったForteFibreのメンバー全員に謝意を表します。
僕の学生ロボコンはこれでひとまず終わりですが、またどこかで会いましょう!!
さようなら!!
