まえがき
お久しぶりですウトウです。僕たちは昨年6月4日(日)に東京にて行われたNHK学生ロボコンに挑みました。僕たちにとってはロボコンを始めて約2年の集大成となる大会であり、全員が死ぬ気で取り組みました。ロボコンに関してもそうですが、入部当初は、当時の三回生はしっかりされていて、‘三回生ってもう大人やん…’と思っていました。僕も三回生になったらあんな感じになれるのかな、と思っていたのですが、蓋を開けてみると、想像以上にそのままだったなと感じます(泣)。そんな僕の2年間を詰め込んだNHKロボコンについて少し書き残させて頂きます。大会結果や総括は別の記事にて行われているので、ここでは、機体紹介、特に二機体あるうちの一つ、ERについて説明をさせて頂きます。
ハードウェア
機体紹介
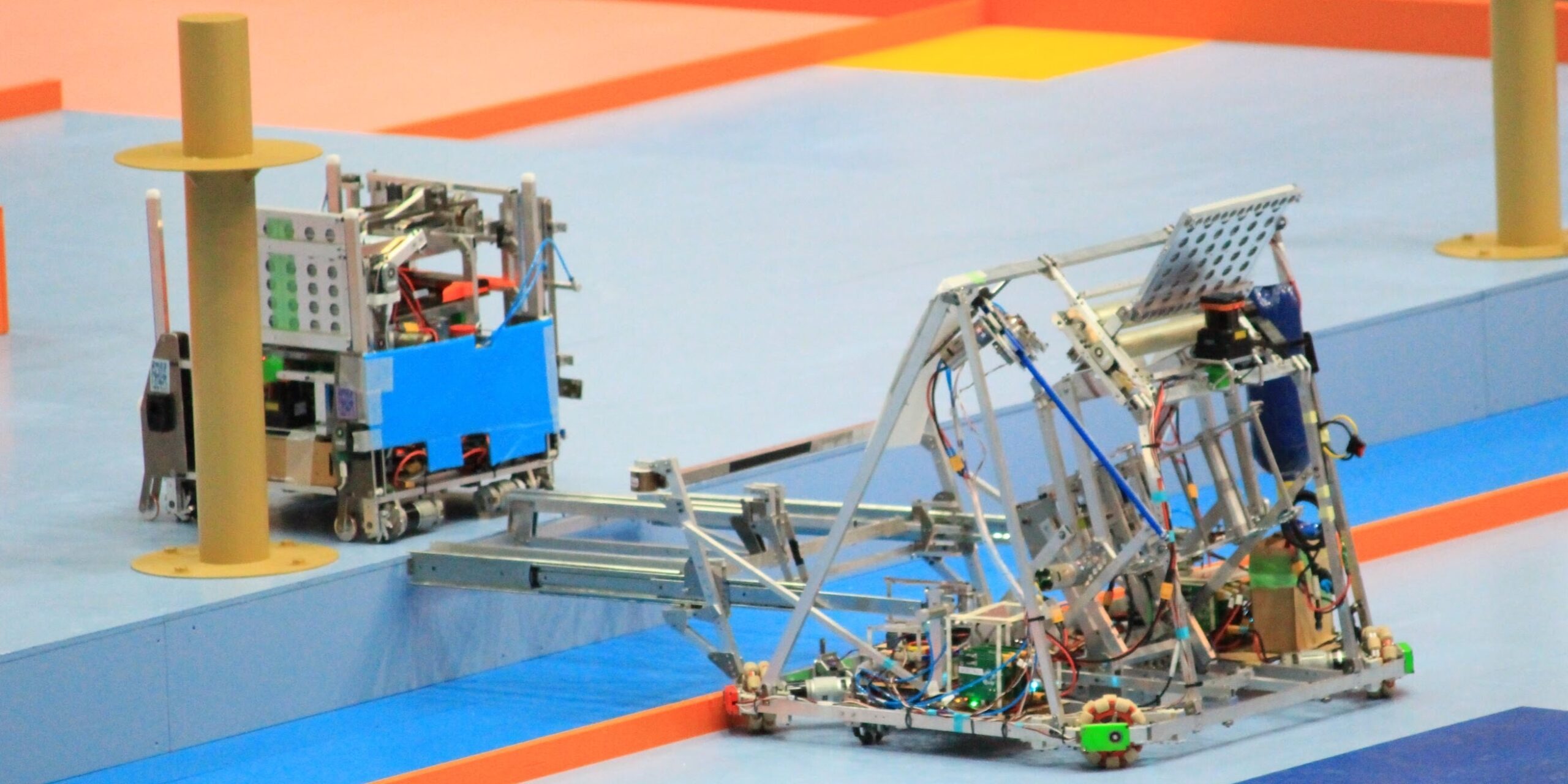
数週間にわたるアイデア出しのすえ、僕たちが考えついた戦略は’RRによる最速妨害’です。そのためにERはRRの橋渡しを行うような機構を必要としました。

これが最終的なERです。肉抜きあとが美しいですね。メインとなる橋渡し機構は当初モーターで動かす想定でしたが、最終的には、定荷重ばねと呼ばれるばねで押し出すような機構になりました。また、現地でのフィールドの誤差なども考慮し、高さ調整ができるようにもしました。橋渡し機構は度重なる修正を繰り返し、一時はほとんど成功せず、二次ビデオ作製の遅延にも多分に影響を及ぼしました。前日練習でもなぜか成功しないという事態もありましたが、本番では二試合ともうまく機能してくれました。センターエリアの到達スピードは他大さんと比較しても早く、良い形で試合を始めることができたと思います。
次にリングの射出です。リング射出はローラーにより行われました。ローラーは加速距離が短く、小型のRRやRR運搬により機体の範囲が制限されたERにとっては、サイズの面でありがたい射出機構でした。一方で、リングを直接挟むような構造であるため、リングの個体差をもろにうけ、飛距離、射出姿勢が安定しづらい射出機構でもありました。しかし、大会2週間前に、ガイドをつければかなり射出姿勢が安定するということがわかり、急遽取り付けられたガイド(通称そろばん)によって、射出機構の正確さはかなり上がりました。本番でもリングは半分以上がポールに入ってくれていました。
全体を通して、煩雑な機体となり、修正点はいくつもありましたが、いい機体だなと思います。入った当初は当時のNHK機体を見て、こんな大きな機体どうやって作るんだ、と思いながら新人戦でポンコツハンドを生成していた僕が、一人ではないとはいえ、NHK機体をそれなりに設計ができたことは感慨深いものがあります。機体作りは設計も加工も組み立てもしんどいことだらけでしたが、組み上がってそれが動いているところを見ると、やっぱり感動しますね。
ソフトウェア
ER制御担当のぷく猫です.足回り、リングの回収・装填・射出、橋渡し機構の制御プログラム、射出実験を担当しました。
射出実験と制御に分けて説明していきたいと思います。
射出実験
射出には、リングの個体差によって、空中姿勢・飛距離が安定しないという二つの大きな問題あり、本番直前までその原因追及に時間を費やしていました。
改めて振り返ると制御の時間1割、射出実験の時間9割と感じるくらいずっと射出実験をしていた気がします。。。(  ̄ - ̄) 遠い目

下側のローラー:赤方向の力 上側のローラー:青方向の力
結果として、空中姿勢が変わってしまう主な原因は、リングの僅かな歪みによって、下側のローラーに先にあたるか、上側のローラーに先にあたるか変わってしまうためでした!Σ( ˙꒳˙
下側のローラーに先にあたると、赤矢印の方向により多くの時間力が加わり、上側のローラーに先にあたると青矢印の方向により多くの時間力が加わります。(上の写真参照)つまり、下側のローラーに先にあたると、赤方向の回転成分が強くなるため、45°で射出されたリングの姿勢が徐々に平行に近づき、許容誤差が減ってしまうという問題が生じていました。

入射角度(赤):30°? ローラーの角度(黄):45° ガイドの角度(青):60°?
この問題の対処法として、
- ローラーの角度に対して、入射角度を小さくすることで上側のローラーに先に当たるようにする
- ガイドをローラーよりも急な角度で取り付けることで射出後のリングをガイドに衝突させ、回転成分を打ち消す
という方法をとりました。(上の写真参照)
この対処法をとることで本番では空中姿勢が安定し、
ローム様から空中姿勢の綺麗さを評価していただき、特別賞をいただけました!!
ただただ、ほんっとに嬉しかったです。
実は、リングの歪みは本当に僅かで、パッと見では分からないレベルだったため、原因を解明できたのは2次ビデオ撮影直前でした。さらに、ガイドをつければ射出姿勢が安定するということが判明したのが、大会2週間前だったため、今振り返るとかなりギリギリな橋をわたっていたなと思います。。。Σ(-∀-;)
また、空中姿勢を評価していただけた一方で、リングによって飛距離が変わる原因は最後まで分からず、安定性を高めることができなかったため、足回りで正面まで移動するという対応になりました。。。
長い距離になればなるほどリングの個体差による誤差がうまれてしまい、1m以上誤差が生まれるリングもありました。実は一時期ERもtype3を狙える性能になったことがあったのですが、射出精度の低さや重量制限から元の機構に戻りました。Type3にバシバシ入れるERを見てみたかったです…!(´;ω;`)
制御
さて、射出実験について色々語ってしまったところで、残り一割の部分である制御についてさらっと説明したいと思います。( ̄・ω・ ̄)
足回りは、経路追従制御(Pure Pursuit)を採用しており、複数経路を用意することで試合状況に合わせて、指定したポール前に移動するコードを書いていました。
また、自己位置推定では、接地エンコーダーの値を基準にし、ポール近くに移動した際にLRFで補正をかけていました。さらに、ポールの正面に移動した際に、絶対座標系における距離ではなく、LRFが出す相対的な距離のみで最終調整をかけることで、ポールに対して距離が一定の場所に移動するコードを書いていました。
試合状況に合わせて予め経路を生成しておく方法は、経路の数が膨大になり、当日のテストランで調整に時間がかかってしまうため、お勧めしません!(>_< )
試合本番
そのようななか迎えた本番ですが、基板の動作確認不足で、メイン基板の故障に気づかず一試合目に出場してしまい、練習不足・事前の準備不足を痛感しました。さらに、2試合目では、コード上の安全機能が間違って働いてしまい機体を動かせなくなってしまいました。今まで準備してきたものが出せなかったこと、コードのデバックが足りていなかったことが本当に本当に悔しい限りです。。。
結果は満足のいくものになりませんでしたが、2次ビデオを乗り越え、NHK学生ロボコンに出場できたのは、先輩方や周りの方々が手伝ってくださったおかげです。支えて下さり本当に本当にありがとうございました!
あとがき
最後となりますが,改めて大会運営に尽力してくださった皆様,活動を支援・応援してくださった皆様,そしてチームのみんな,全ての方々に感謝申し上げます!
悔しくも楽しい期間でしたが、これまでの人生の中で最も大きな経験となりました。これからは後輩の支援・運営に力を入れていきたいと考えています!
本当にありがとうございました!!