皆様、お疲れ様です。一回生ソフトのほしいもと申します。今回我々は、3月8日に開催された、関西春ロボコンに引き続き、3月14日に開催された、関東春ロボコンに出場しました。本記事では、その活動報告をさせていただきます。
チーム紹介
今回出場したチームの構成は、関西と同じく、ハード9人、ソフト6人の計15名となります。全員が一回生で、弊部に入り、二回目の大きな大会への出場となりました。
機構紹介


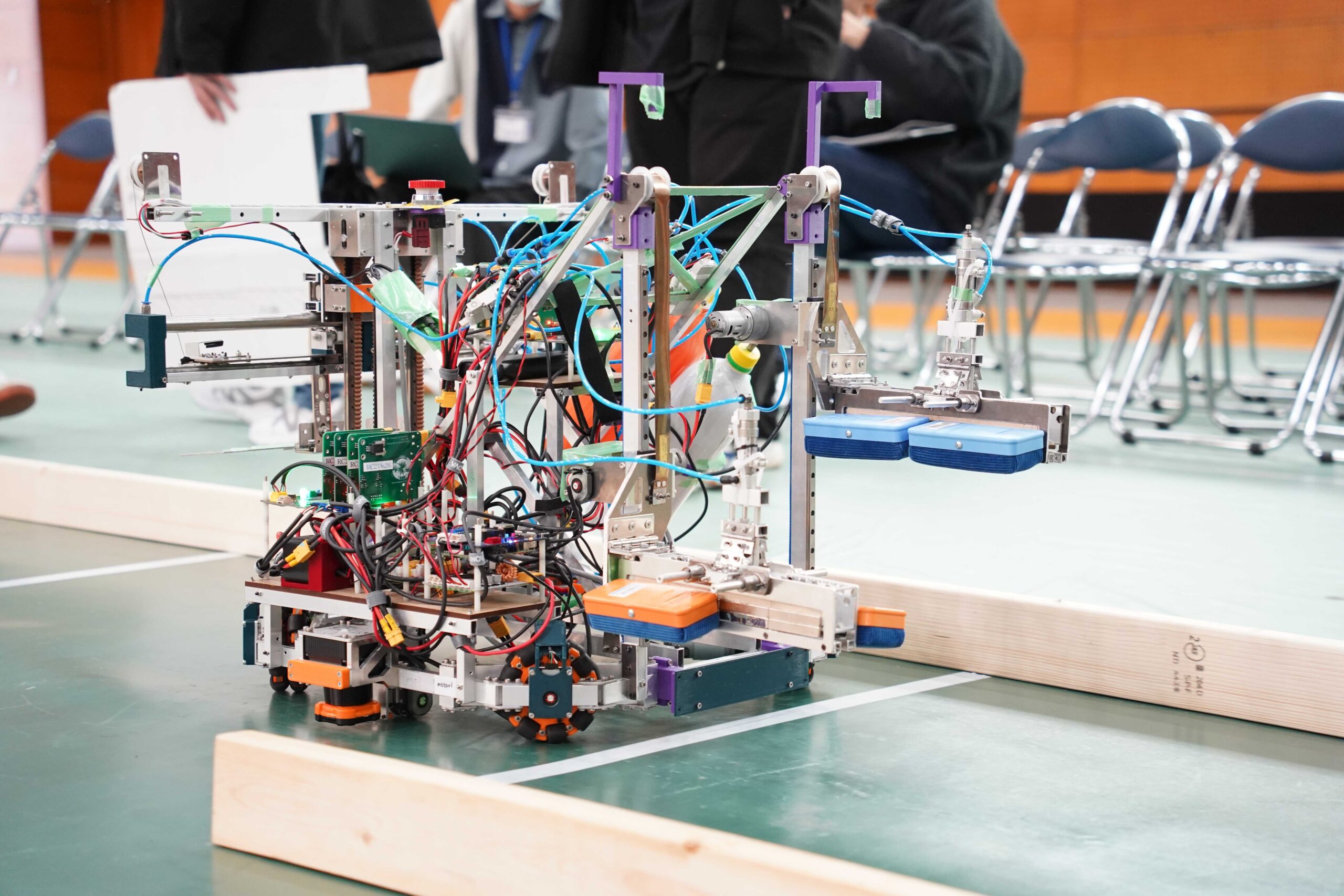
機構に関しては関西春ロボから変わっていないので、ここでの詳しい紹介は割愛させていたただきます。詳しくは関西春ロボの活動報告をご覧ください。が、ただ一つ
なぜか僕のパソコンが機体に乗りました

いやぁ…実は直前に競技中、セッティングタイム中の外部機器(今回PC)での操作が禁止なことが発覚しまして…
ならPCを機体にすればええやん
というわけで乗りました。僕のPC。機体審査が通って良かったです、本当に。
制御紹介
私はソフト班であるということで、ここでは制御について紹介できればと思います。
今回我々は、ルール上、自動機が有利であると考え、自動機を選択しました。そこで、自律移動に適したROS2を使って、各機能に対応したノードを作成し、作業分担のしやすい形で開発を行いました。更に、複雑な制御を視覚的、直感的に設計できるように、BehaviorTreeを用いて自動化を試みました。

自己位置推定の手法としては、機体に搭載された接地エンコーダにより大まかな自己位置を推定し、更に、Lidarにより自己位置のズレを修正することで、より精度の高い自己位置を得ることができました。
結果
結果としては、予選リーグで一勝一敗となり、予選敗退という結果になってしまいましたが、特別賞として、アイデア賞をいただきました!

最後に
我々1回生にとって、二回目となる大きな大会であり、もちろんうまく行かないこともありましたが、最後までやり切ることができ、我々の努力を形として残すことができて本当に良かったです。これを糧として、最終目標であるNHKロボコンに向け、引き続き頑張って行ければと思います。
最後まで読んでいただき、ありがとうございました!
