
はじめまして。夏ロボチームリーダーのYです。8月23日に大阪にあるアクティブ・スクエア・大東にて関西夏ロボコン2025が開催されました。関西夏ロボコンは今年初めて開催されたということもあり大変なことも多くありましたが、前回の関西春ロボコンの経験を活かしながら活動をしてきました。いつものように冗談を言いたいところですが、今回は真面目な記事をかくので最後まで見ていただけると幸いです。
チームについて
今回も荒れました。今回2チームから1チームになったことで思想の対立やモチベの低下が顕著にみられましたが、幸い大会中の退部者は1名にとどまりました。
機体について
私たちは最初操縦者に負担をかけないことをモットーに3階建てまで建築可能な機体を設計しましたが、どうしてもVゴールの夢を捨てきれずボール回収や射出機構も搭載しました。春ロボのトラウマを抱えながらも7月上旬にはほとんど完成し、すでに動いている機構もありました。エア基盤が燃えてしまうというトラブルもありましたが、大会当日までにすべての機構を動く状態にしてくれたソフトには感謝の気持ちでいっぱいです。

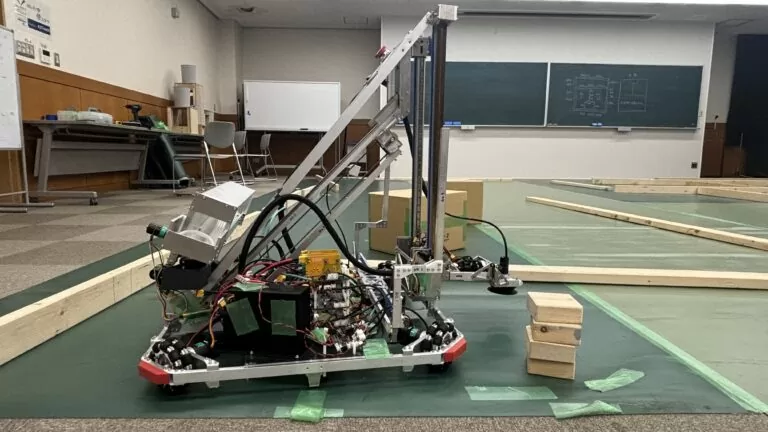
↑ベアリングガイドとベルト昇降を組み合わせた2段階昇降機構&3軸回転吸着機構

↑段ボール引き寄せ&中心合わせ機構

↑ボール回収&装填機構

↑直動射出機構
大会について
初の大会ということもあって6チームしか参加していなかったため、前日は8回もテストランすることができました。しかしエアの継ぎ手から空気が漏れていたり、吸盤がしっかり密着していなかったりという問題点があり、ルールの欠陥もあって大会当日は4戦4敗という残念な結果に終わりました。優勝は京都先端科学大学”KUAS”で、力強く見事な試合をみせてくれました。京都大学は吸着アームを使って相手の建築を崩壊させる圧巻のピッチングをみせてくれました。
今後に向けて
今回の敗因はリトライによる段ボールの置き直しが認められるというルールの欠陥や実現可能性の低いVゴール(どのチームもできなかった)にとらわれてしまったこともありますが、やはり段ボールに押し付けた時の反力により吸盤が確実に密着しなかったことにあります。ソフトがもう少し早くワークを用いて実践していればハードによるテコ入れも可能だったかもしれませんが、背に単位は代えられません。次はNHK。もう後がない…